12 system status register (dstatus register), Programming – Lenze PM94P01C User Manual
Page 57
PM94P01C
55
Programming
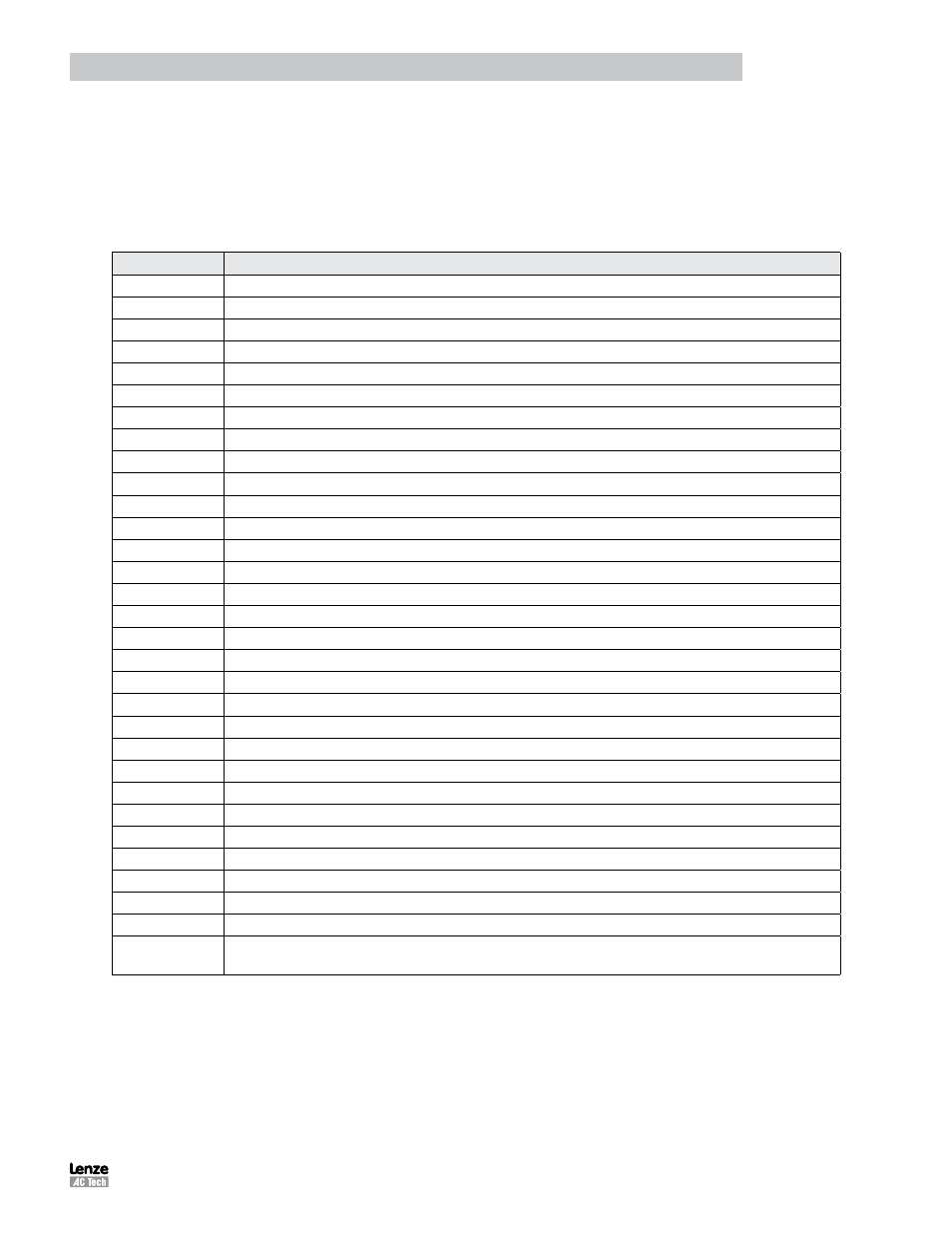
2.12 System Status Register (DSTATUS register)
System Status Register, (DSTATUS), is a Read Only register. Its bits indicate the various states of the PositionServo’s
subsystems as listed in Table 17. Some of the flags are available as System Flag Variables and summarized in
Table13.
Table 17: DSTATUS Register
Bit in register Description
0
Set when drive enabled
1
Set if DSP subsystem at any fault
2
Set if drive has a valid program
3
Set if byte-code or system or DSP at any fault
4
Set if drive has a valid source code
5
Set if motion completed and target position is within specified limits
6
Set when scope is triggered and data collected
7
Set if motion stack is full
8
Set if motion stack is empty
9
Set if byte-code halted
10
Set if byte-code is running
11
Set if byte-code is set to run in step mode
12
Set if byte-code is reached the end of program
13
Set if current limit is reached
14
Set if byte-code at fault
15
Set if no valid motor selected
16
Set if byte-code at arithmetic fault
17
Set if byte-code at user fault
18
Set if DSP initialization completed
19
Set if registration has been triggered
20
Set if registration variable was updated from DSP after last trigger
21
Set if motion module at fault
22
Set if motion suspended
23
Set if program requested to suspend motion
24
Set if system waits completion of motion
25
Set if motion command completed and motion Queue is empty
26
Set if byte-code task requested reset
27
If set interface control is disabled. This flag is set/clear by ICONTROL ON/OFF statement.
28
Set if positive limit switch reached
29
Set if negative limit switch reached
30
Events disabled. All events disabled when this flag is set. After executing EVENTS ON all events
previously enabled by EVENT EventName ON statements become enabled again
PositionServo variable #83 provides Extended Status Bits, the encoding of which is listed in Table 18.