2 system flags, Programming – Lenze PM94P01C User Manual
Page 44
PM94P01C
42
Programming
Index
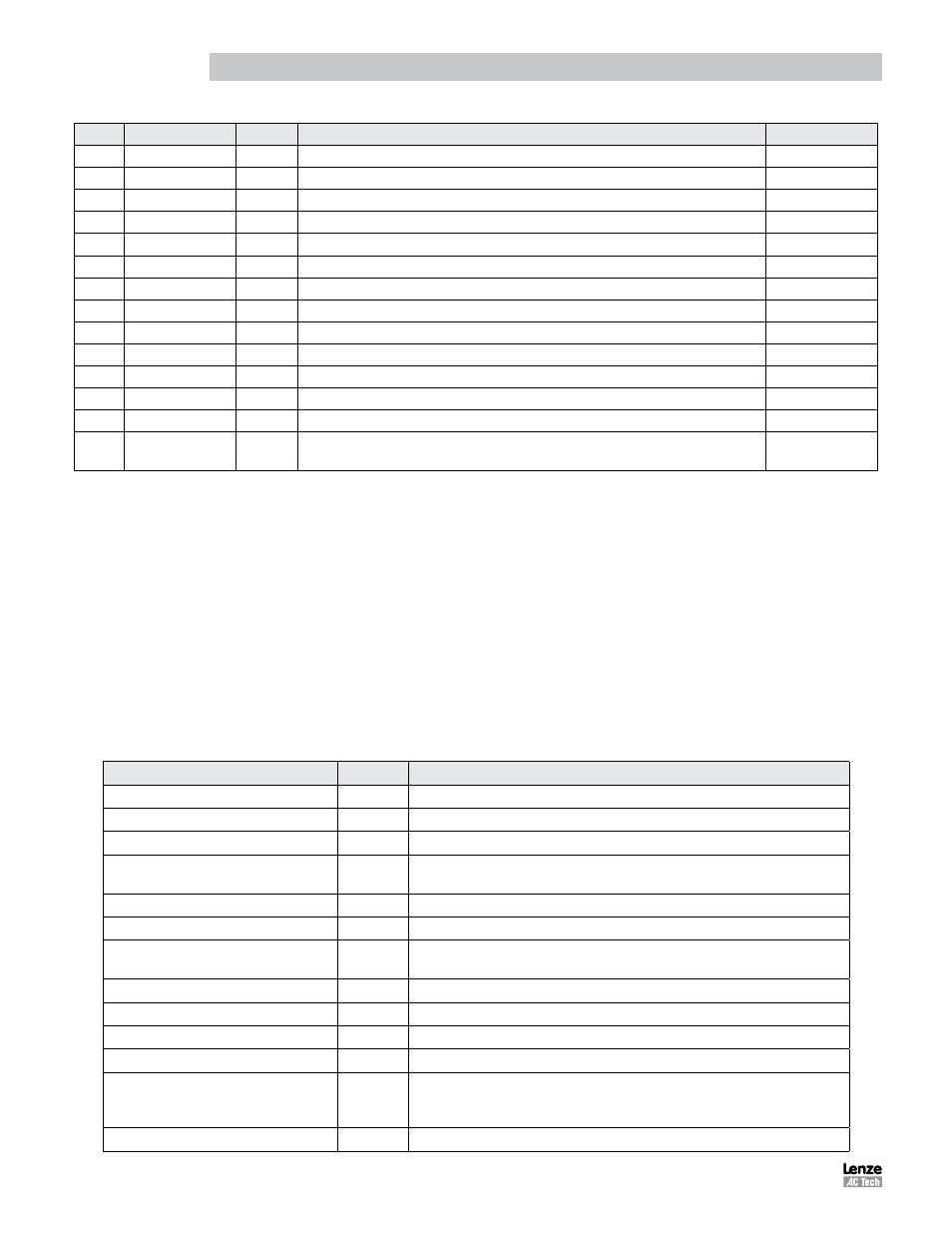
Variable
Access Variable Description
Units
188
PHCUR
R
Motor phase current
A(mpere)
183
QDECEL
R/W
Quick Deceleration for STOP MOTION QUICK statement
User Units/Sec
2
213
RPOS
R
Registration position. Valid when system flag F_REGISTRATION set
User Units
212
RPOS_PLS
R
Registration position
Feedback Pls
218
TA
R
Commanded acceleration
User units/Sec
2
214
TPOS
R/W
Theoretical/commanded position
User Units
219
TPOS_ADV
W
Theoretical/commanded position advance
Feedback Pls
189
TPOS_PLS
R/W
Theoretical/commanded position
Feedback Pls
217
TV
R
Commanded velocity in
User Units/Sec
186
UNITS
R/W
User Units scale.
(1)
UserUnits/Rev
185
VEL
R/W
Set Velocity when in velocity mode
User Units/Sec
44
VGAIN_P
R/W
Velocity loop P-gain
-
45
VGAIN_I
R/W
Velocity loop I-gain
-
100-
131
V0 - V31
R/W
User Variables
(1)
When a “0”, (Zero), value is assigned to the variable “UNITS”, then “USER UNITS” is set to QUAD ENCODER COUNTS. This is the default setting
at the start of the program before UNITS=
(2)
Any value outside +/- 10 range assigned to AOUT will be automatically trimmed to that range
Example:
AOUT=100 , AOUT will be assigned value of 10.
V0=236
VOUT=V0, VOUT will be assigned 10 and V0 will be unchanged.
2.8.2 System Flags
Flags don’t have an Index number assigned to them. They are the product of a BIT mask applied to a particular system
variable by the drive and are available to the user only from the User’s program. Table 13 lists the System Flags with
access rights and description.
Table 13: System Flags
Name
Access
Description
IN_A1-4, IN_B1-4, IN_C1-4
R
Digital inputs . TRUE if input active, FALSE otherwise
OUT1, OUT2, OUT3, OUT4, OUT5
W
Digital outputs OUTPUT1- OUTPUT5
F_ICONTROL OFF
R
Interface Control Status (ON/OFF) #27 in DSTATUS register
F_IN_POSITION
R
TRUE when Actual Position (APOS) is within limits set by
INPOSLIM variable and motion completed
F_ENABLED
R
Set when drive is enabled
F_EVENTS OFF
R
Events Disabled Status (ON/OFF) #30 in DSTATUS register
F_MCOMPLETE
R
Set when motion is completed and there is no motion commands
waiting in the Motion Queue
F_MQUEUE_FULL
R
Motion Queue full
F_MQUEUE_EMPTY
R
Motion Queue empty
F_FAULT
R
Set if any fault detected
F_ARITHMETIC_FLT
R
Arithmetic fault
F_REGISTRATION
R
Set when registration mark was detected. Content RPOS variable is
valid when this flag is active. Flag resets by any registration moves
MOVEPR,MOVEDR or by command REGISTRATION ON
F_MSUSPENDED
R
Set if motion suspended by statement MOTION SUSPEND