Function library lenzeiosystem.lib, Function blocks – Lenze DDS Function library IOSystem User Manual
Page 41
Function library LenzeIOSystem.lib
Function blocks
4.9
L_IOParPDO610 − Parameterisation function
4−23
L
LenzeIOSystem.lib EN 1.7
Note!
Features and use of the L_IOParPDLO610 FB.
·
Use the L_IOParPDO610 FB last in a sequencer consisting of several FBs for
parameterisation. By means of the L_IOParPDO610 FB, parameterisation of the I/O system is
carried out.
·
Parameterise the controller as master.
After the boot−up time has expired, for the master the change from the Pre−operational to the
Operational status is effected automatically.
·
For sending the NMT telegram, the controller has to be in the Operational CAN status.
·
If several IO systems (stations) are parameterised with standard values via the
L_IOParPDO610 FB on the system bus, an identifier collision between the individual PDOs of
these stations can occur. Therefore check the identifiers used.
After changing to the Operational CAN status, the current process image of the I/O system is sent.
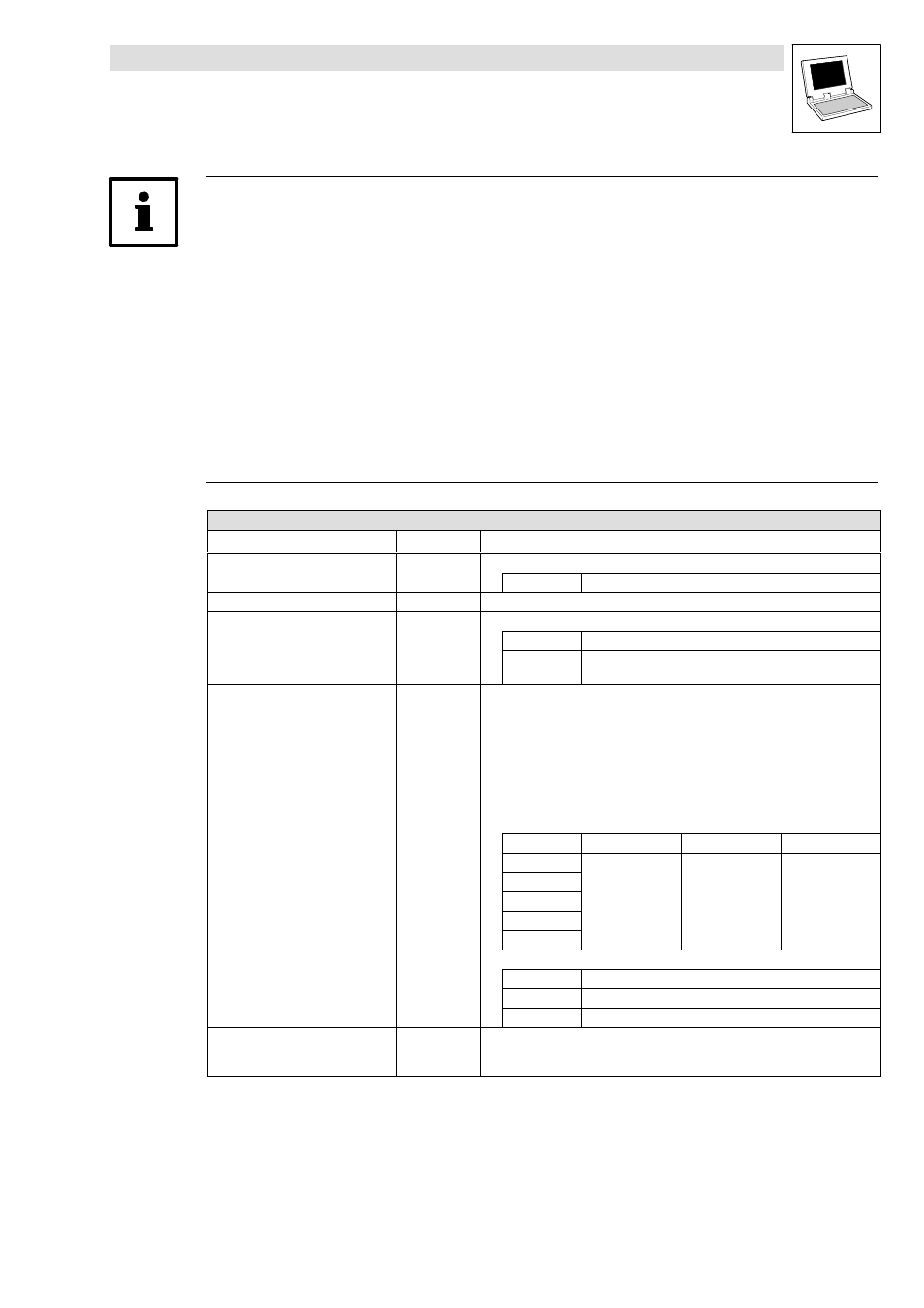
ð Inputs
(Variable type: VAR_INPUT)
Variable name
Data type
Information/possible settings
bExecute
BOOL
Execute write request
FALSE
ä TRUE Write request is executed
byNodeAdr
Byte
Device address: 1 − 63
bInitIOSystem
BOOL
Initialise I/O system after parameterisation
TRUE
·
Value acceptance by reset node
FALSE
·
No value acceptance
·
I/O system is not initialised
wCobID_RxPDO6
...
wCobID_RxPDO10
WORD
Setting identifiers
Default values: input wiring = 0
RxPDO = receive identifiers from the I/O system
Identifiers can be optionally set by value selection.
If the input wiring is "0", the identifiers are composed as follows.
Note: The basic identifiers are not settled in the pre−assigned area of the standard
system bus.
ID range: 384−831
By this, crossovers of the ID with the free CAN objects which the IO−lib is based on
are avoided.
RxPDOX
Identifier =
Basic ID +
Node address
RxPDO6
862
860
2
RxPDO7
865
RxPDO8
870
RxPDO9
875
RxPDO10
880
byTransmissionType_RxPDO6
...
byTransmissionType_RxPDO10
Byte
Transmission mode
0 Event−controlled
1 Time−controlled
2 Event−controlled with superimposed cycle time
tCyceTime_RxPDO6
...
tCyceTime_RxPDO10
Time
Cycle time: t = 0 − 65535 ms