7 second pid parameter set 24, Formulas, Parameter adjustment effects – West Control Solutions KS 50-1 User Manual
Page 24: 7 second pid parameter set
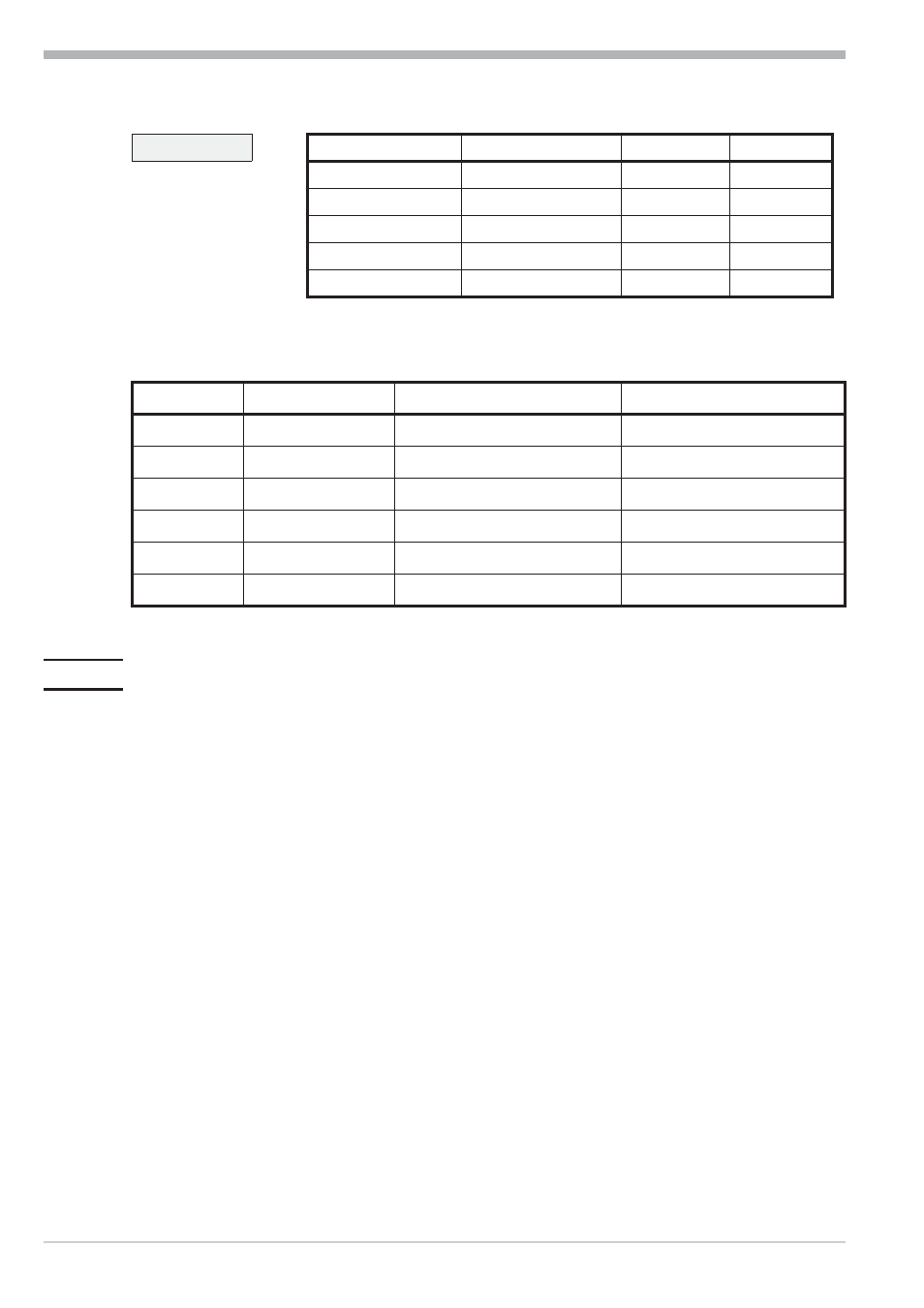
Formulas
K = Vmax * Tu
controller behavior
Pb1 [phy. units]
td1 [s]
ti1 [s]
With 2-point and
3-point controllers,
the cycle time must be
adjusted to
t1 / t2 £ 0,25 * Tu
PID
1,7 * K
2 * Tu
2 * Tu
PD
0,5 * K
Tu
OFF
PI
2,6 * K
OFF
6 * Tu
P
K
OFF
OFF
3-point-stepping
1,7 * K
Tu
2 * Tu
Parameter adjustment effects
Parameter
Control
Line-out of disturbances
Start-up behaviour
Pb1 higher increased damping slower line-out
slower reduction of duty cycle
lower
reduced damping
faster line-out
faster reduction of duty cycle
td1 higher reduced damping
faster response to disturbances faster reduction of duty cycle
lower
increased damping
slower response to disturbances slower reduction of duty cycle
ti1 higher increased damping slower line-out
slower reduction of duty cycle
lower
reduced damping
faster line-out
faster reduction of duty cycle
3.7 Second PID parameter set
The process characteristic is frequently affected by various factors such as pro-
cess value, correcting variable and material differences.
To comply with these requirements, the controller can be switched over between
two parameter sets. Parameter sets
PArA and PAr.2 are provided for heating
and cooling.
Dependent of configuration, switch-over to the second parameter set
(
ConF/LOG/Pid.2) is via key è , one of digital inputs di1, di2, di3,
or interface (OPTION).
g
Self-tuning is always done using the active parameter set, i.e. the second
parameter set must be active for optimizing.
Operation
Second PID parameter set
24
KS50/52-1