F ∆ f t – KROHNE BM 70 M User Manual
Page 5
BM 70 M
5
1
Range of applications
The BM 70 M Level-Radar level gauging system is designed to measure the distance, level,
volume and reflection of liquids, pastes, slurries, solids and particulate materials.
BM 70 M Ex hazardous-duty versions are suitable for use in Ex-Zone 0, 1 and 2.
2
Mode of operation and system structure
2.1
Operating principle (FMCW-Radar)
A radar signal is given via an antenna, reflected on the measuring surface and received after a
delay time t.
FMCW: Frequency Modulated Continuous Wave
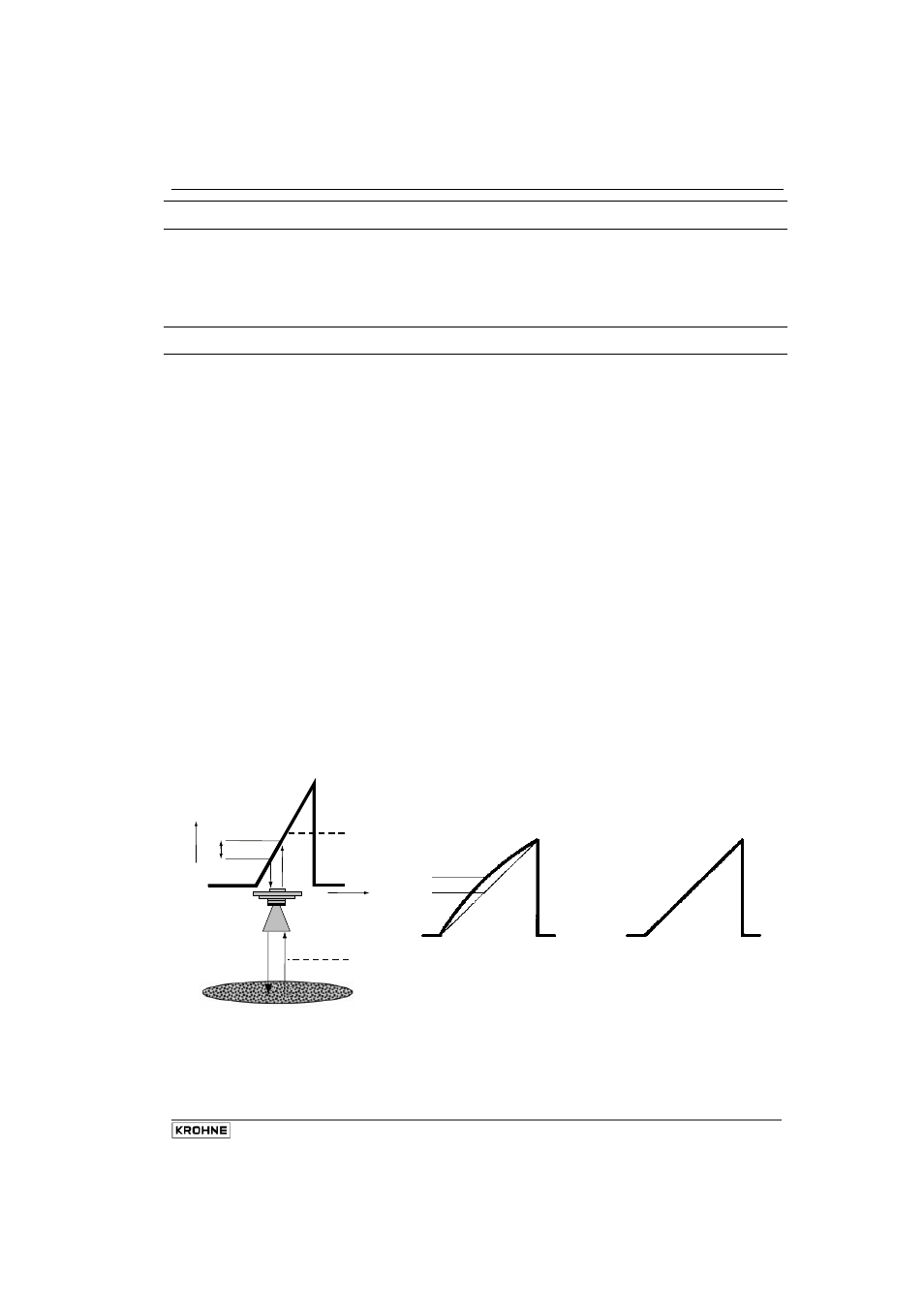
The FMCW-radar uses a high frequency signal (~10 GHz) which transmits frequency increasing
linearly 1 GHz during the measurement (frequency sweep) (1). The signal is emitted, reflected on
the measuring surface and received time-delayed (2).
For further signal processing the difference
∆
f is calculated from the actual transmit frequency
and the receive frequency (3). The difference is directly proportional to the distance i.e. a large
frequency difference corresponds to a large distance and vice versa.
The frequency difference is transformed via a Fourier transformation (FFT) into a frequency
spectrum and then the distance is calculated from the spectrum. The level results from the
difference between tank height and distance.
Linearity of frequency sweeps
The measuring accuracy of an FMCW radar is determined from the linearity of the frequency
sweeps and their reproducibility. The linearity correction is deduced via reference measurement
of the oscillator.
An immediate frequency regulation is necessary with the BM 70 M device because of the higher
demand on the measuring accuracy.
With the PLL technology (Phase Locked Loop) the signal frequency is directly recorded as a
digital data and the converter oscillator locks automatically on the right frequency.
3) differential frequency
formed
1) radar frequency
linearly changed
2) delay time due to wave
propagation
f ∆f
t
antenna
∆f
non-linear sweep
linear sweep
f
Start
f
Stop