Yokogawa YVP20S User Manual
Page 37
5-8
<5. FOUNDATION FIELDBUS OVERVIEW>
IM 21B04C50-01E
(8) Out of Service (OOS)
The block is not being evaluated. The output and setpoint are maintained at last value.
(9) Multiple Modes and States
The AO block must go to CAS mode to connect to a PID function block in cascade. To stop
the setpoint signal from the AO to the transducer block, the AO block must go into OOS
mode.
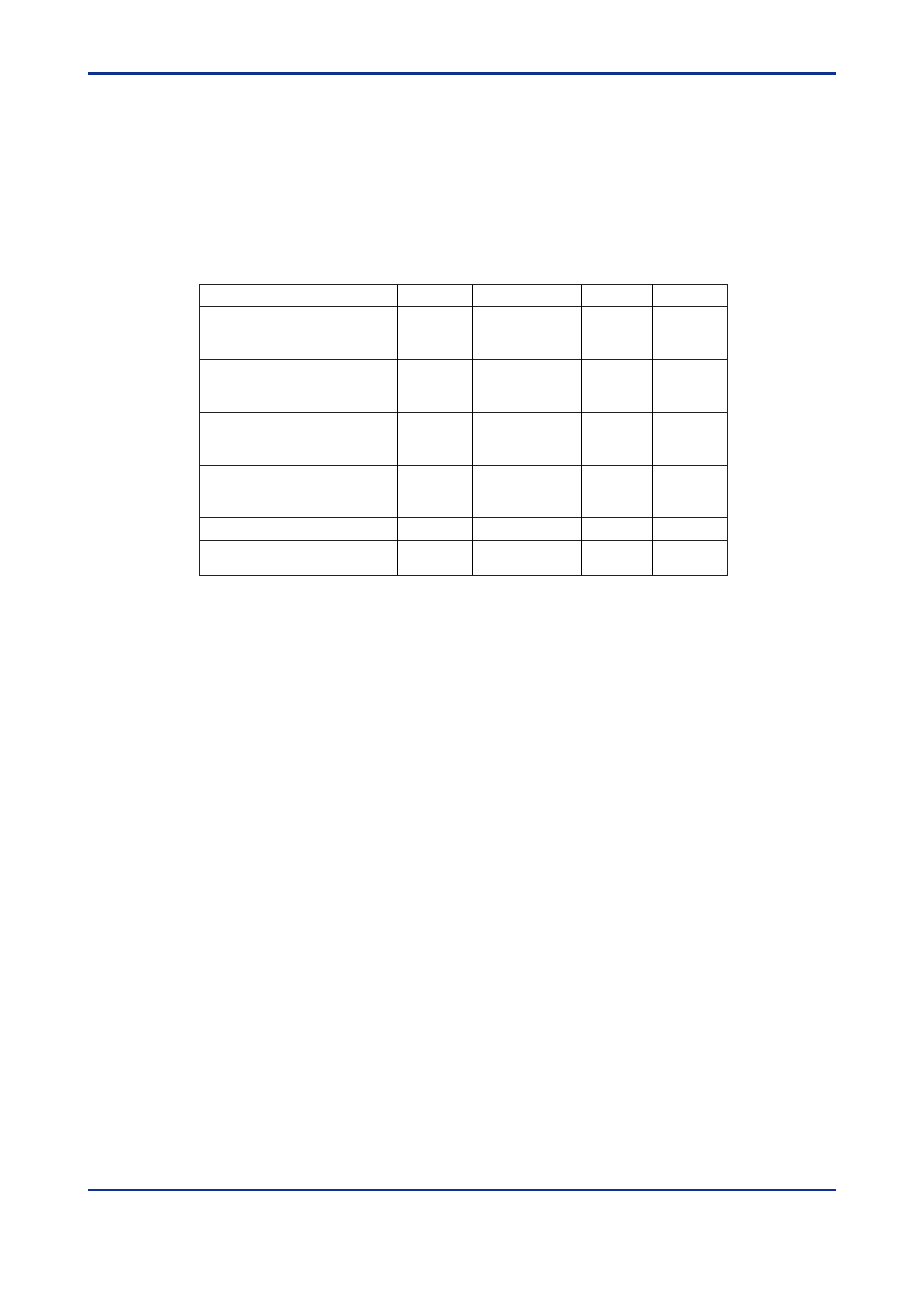
The following, Table 5.2, shows examples of mode operation (not showing all cases).
Table 5.2 Mode operation
Operation
Configure the transducer block
(Auto tuning, travel calibration,
diagnostics, etc.)
Configure transducer block
(Changing position control
parameters, etc.)
Manual valve positioning
from ValveNavi or other
human interface.
Manual valve positioning
from a PID controller human
interface
PID single loop control
PID cascade loop control
(AI)
AO
TB
PID
OOS
Man
Manual
Auto
Auto
Auto
CAS
Cas
Cas
Auto
Auto
OOS
primary :Auto
secondary :CAS
OOS
Auto
Auto
T0502.EPS
When a block is in OOS mode, its output status will be “bad,” so that any connected blocks
will know and automatically change their modes. For example, when a PID block sees bad
status in its BKCAL IN, it will go to IMAN mode for initialization to the downstream block
while awaiting the status to return to “good cascade. ”