Yokogawa YVP20S User Manual
Page 35
5-6
<5. FOUNDATION FIELDBUS OVERVIEW>
IM 21B04C50-01E
ValveNavi manages the operational states of the positioner and its embedded PID control-
ler by controlling the target modes for each of the function blocks. The actual mode of each
block may be different from the target mode. The actual mode is controlled by the block
itself in accordance with mode rules based on the quality of the data and modes of the
linked blocks. A brief summary of modes follows, but a thorough discussion of modes is
beyond the scope of this instruction. The interested reader is referred to the Fieldbus
Foundation that specifies the formal rules for mode changing.
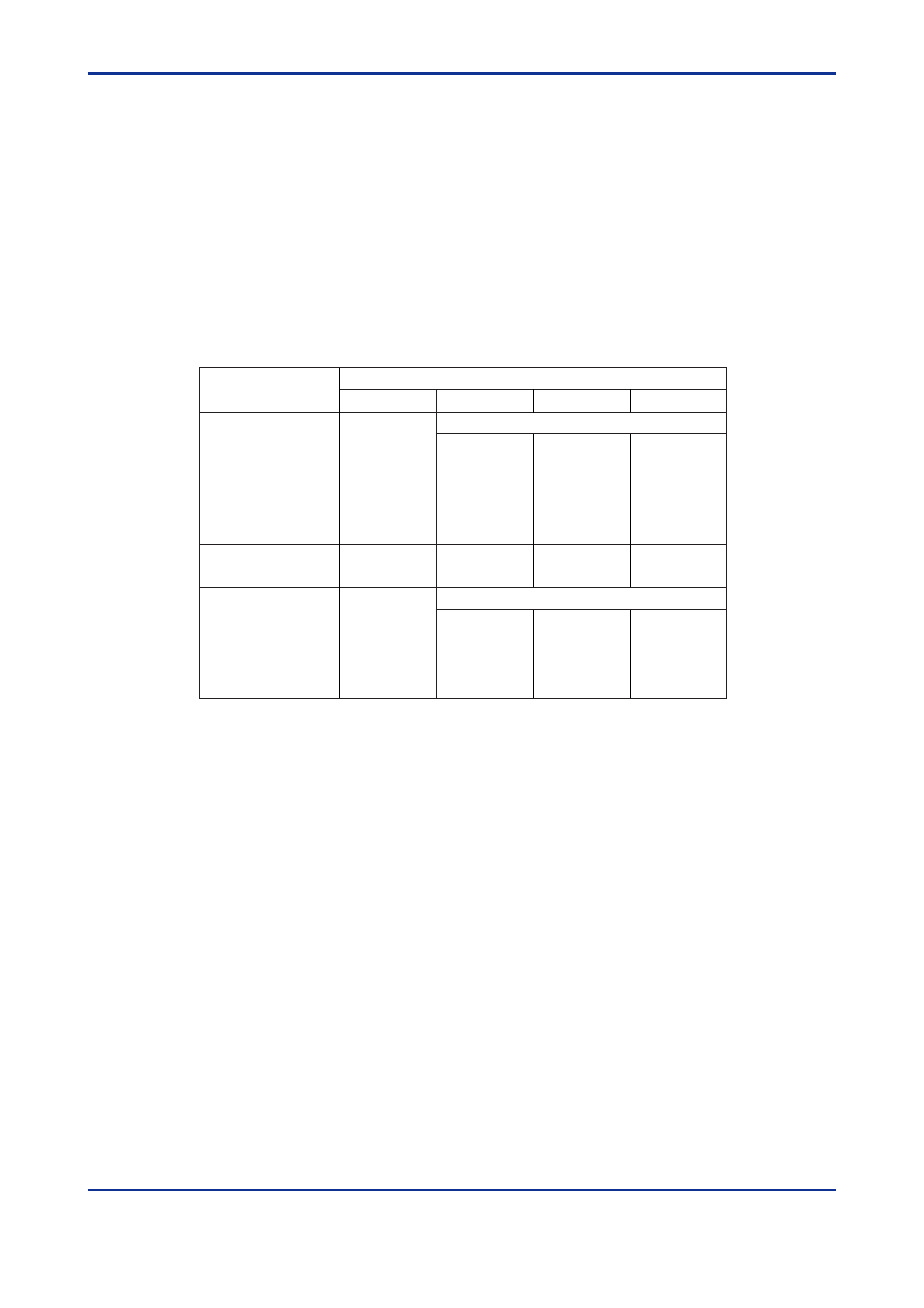
Three operational states are set by ValveNavi (Figure 5.6 and Figure 5.7). The Out Of
Service (OOS) state forces all of the blocks to Out Of Service Mode. The outputs remain at
the values prior to the state change. All output calculation is suspended. Back calculation
values are passed to other linked blocks to enable initialization. Note that the PID will
remain in OOS after configuration changes unless it is put into one of its allowed modes
from the PID dialog. The PID dialog can be started from the Device Operation Dialog.
Table 5.1 Allowed Block Modes For Three Operational States
Operational state
Function Block and Block Modes
Out of Service (OOS)
PID
AO
TB(Auto)
RB(Auto)
OOS
IMan
Man
Auto
CAS
RCAS
1 or more block is in OOS
OOS
Man
Auto
CAS
RCas
OOS
Auto
OOS
Auto
Manual operating
state
OOS
Iman
Normal Operating
state
RCas
IMan
Man
Auto
Cas
Each block must be one of the modes below
Auto
Cas
RCas
Auto
Auto
T0501.EPS
Man
Auto
Auto
Note: Italics indicate a permitted actual mode but a dis-allowed target mode.
Bold type indicates a target mode.