A8.10 bumpless transfer, A8.11 setpoint limiters, A8.11.1 when pid block is in auto mode – Yokogawa digitalYEWFLO (DY-FF) User Manual
Page 132: A8.11.2 when pid block is in cas or rcas mode, A8.10 bumpless, Transfer, A8-6, A8.11 setpoint, Limiters
A8-6
IM 01F06F00-01EN
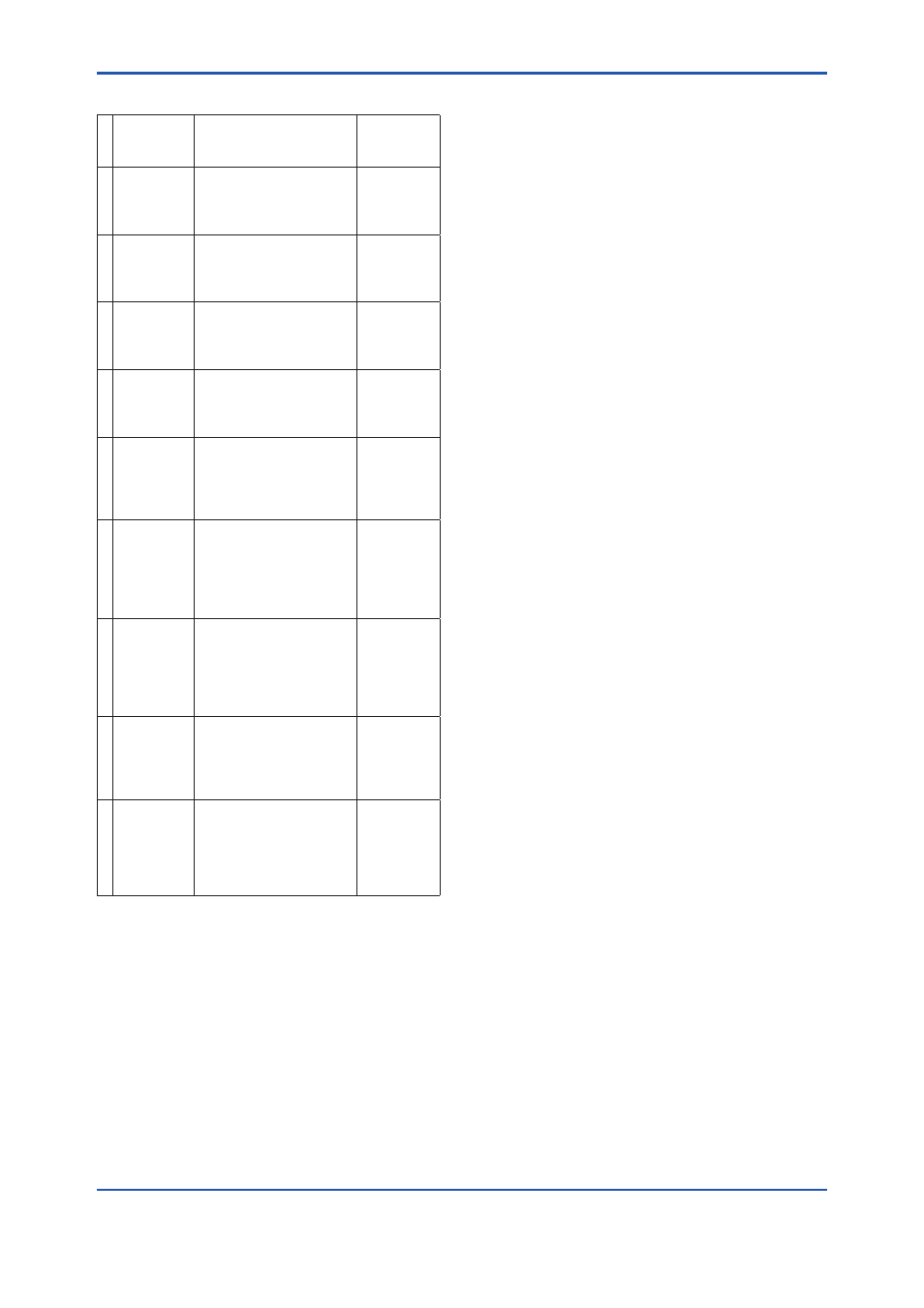
Mode Transitions
Transition
Destination
Mode
Condition
NOT
Conditions
1 O/S
If O/S is set in MODE_ BLK.
target (or if O/S is set in
target inside the resource
block)
2 IMan
If the specifi ed condition is
met (refer to APPENDIX 8.14
“Initialization and Manual
Fallback (IMAN).”)
NOT if
condition 1 is
met
3 LO
If Track Enable is specifi ed in
CONTROL_OPTS and the
value of TRK_IN_D is true
NOT if either
or both of
conditions 1
and 2 are met
4 Man
If Man is set in MODE_ BLK.
target or if IN.status (input
status) is Bad
NOT if any
one or more of
conditions 1 to
3 are met
5 Auto*
If Auto is set in MODE_ BLK.
target
- AND -
if IN.status (input status) is
not Bad
NOT if any
one or more of
conditions 1 to
3 are met
6 Cas*
,
**
If Cas is set in MODE_ BLK.
target
- AND -
if neither IN.status (input
status) nor CAS_IN.status
is Bad.
NOT if any
one or more of
conditions 1 to
3 are met
7 RCas*
,
**
If RCas is set in MODE_
BLK.target
- AND -
if neither IN.status (input
status) nor RCAS_IN.status
is Bad.
NOT if any
one or more of
conditions 1 to
3 are met.
8 ROut*
,
**
If ROut is set in MODE_ BLK.
target
- AND -
if ROUT_IN.status (input
status) is not Bad
NOT if any
one or more of
conditions 1 to
3 are met.
9 In accordance
with the
SHED_OPT
setting
If RCAS_IN.status or
ROUT_ IN.status is Bad
(indicating a computer
failure; Refer to APPENDIX
8.17 “Mode Shedding upon
Computer Failure” for details)
* To activate mode transitions to AUTO, CAS, RCAS, and
ROUT, the respective target modes must be set beforehand
to MODE_BLK.permitted.
** A transition to CAS, RCAS, or ROUT requires that
initialization of the cascade connection has been completed.
A8.10 Bumpless Transfer
Prevents a sudden change in the control output
OUT at changes in block mode (MODE_BLK) and
at switching of the connection from the control
output OUT to the cascaded secondary function
block. The action to perform a bump less transfer
differs depending on the MODE_BLK values.
A8.11 Setpoint Limiters
Active setpoint limiters that limit the changes in the
SP value, differ depending on the block mode as
follows.
A8.11.1 When PID Block is in AUTO Mode
When the value of MODE_BLK is AUTO, the four
types of limiters are in force: high limit, low limit,
rate-of-increase limit, and rate-of-decrease limit.
• Setpoint High/Low Limits
• A value larger than the value of SP_HI_LIM
cannot be set for SP.
• A value smaller than the value of SP_LO_LIM
cannot be set for SP.
• Setpoint Rate Limits
The setpoint rate limits are used to restrict the
magnitude of changes in the SP value so as to
change the SP value gradually towards a new
setpoint.
• An increase of the SP value at each execution
period (period of execution in the Block Header)
is limited to the value of SP_RATE_UP.
• A decrease of the SP value at each execution
period (period of execution in the Block Header)
is limited to the value of SP_RATE_DOWN.
A8.11.2 When PID Block is in CAS or RCAS
Mode
By selecting Obey SP Limits if Cas or RCas in
CONTROL_OPTS (Refer to APPENDIX 8.13
“Measured-value Tracking”), the setpoint high/low
limits can be put into force also when the value of
MODE_BLK is CAS or RCAS.