Labview code, C/c++ code, Labview code -5 c/c++ code -5 – National Instruments NI-Motion User Manual
Page 127
Chapter 10
Electronic Gearing and Camming
© National Instruments Corporation
10-5
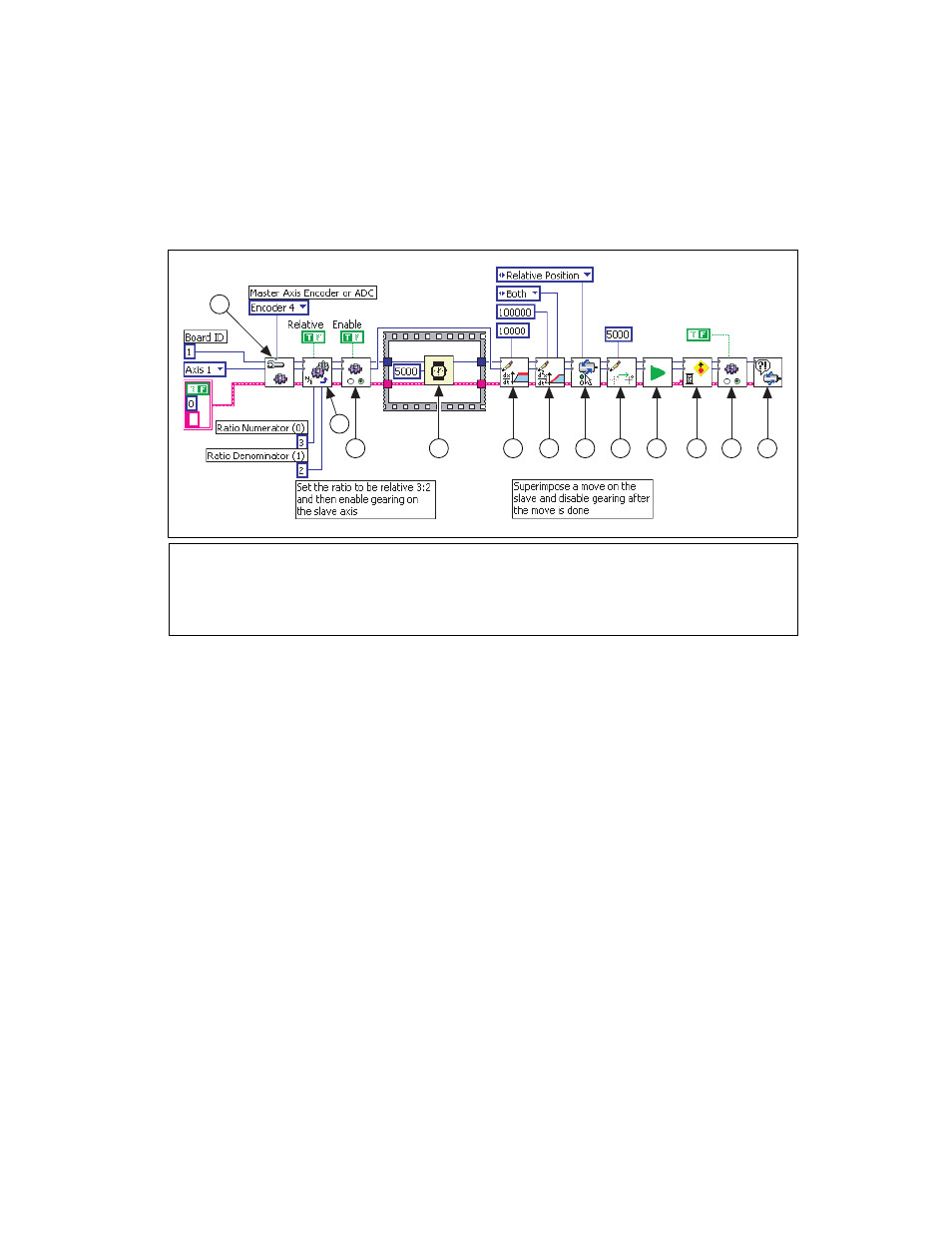
LabVIEW Code
Figure 10-4. Tracking an Encoder Using Electronic Gearing with Superimposed Move
C/C++ Code
The following example code is not necessarily complete, and may
not compile if copied exactly. Refer to the
examples
folder on the
NI-Motion CD for files that are complete and compile as is.
// Main Function
void main(void)
{
u8
boardID; // Board identification number
u8
slaveAxis; // Slave axis number
u8
master; // Gear master
u16
csr = 0; // Communication status register
u16
moveComplete;
//Variables for modal error handling
u16
commandID;// The command ID of the function
u16
resourceID;// The resource ID of the function
i32
errorCode;// Error code
///////////////////////////////
1
Configure Gear Master
2
Load Gear Ratio
3
Enable Gearing
4
Wait
5
Load Velocity
6
Load Acceleration/Deceleration
7
Set Operation Mode
8
Load Target Position
9
Start Motion
10 Wait for Move Complete
11 Enable Gearing Single Axis
12 Read per Axis Status
12
11
10
9
8
7
6
5
4
3
2
1