Control jumpers – Siemens MICROMASTER 411 User Manual
Page 48
3 Commissioning
Issue 03/01
MICROMASTER 411 & COMBIMASTER 411 Operating Instructions
48
6SE6400-5CA00-0BP0
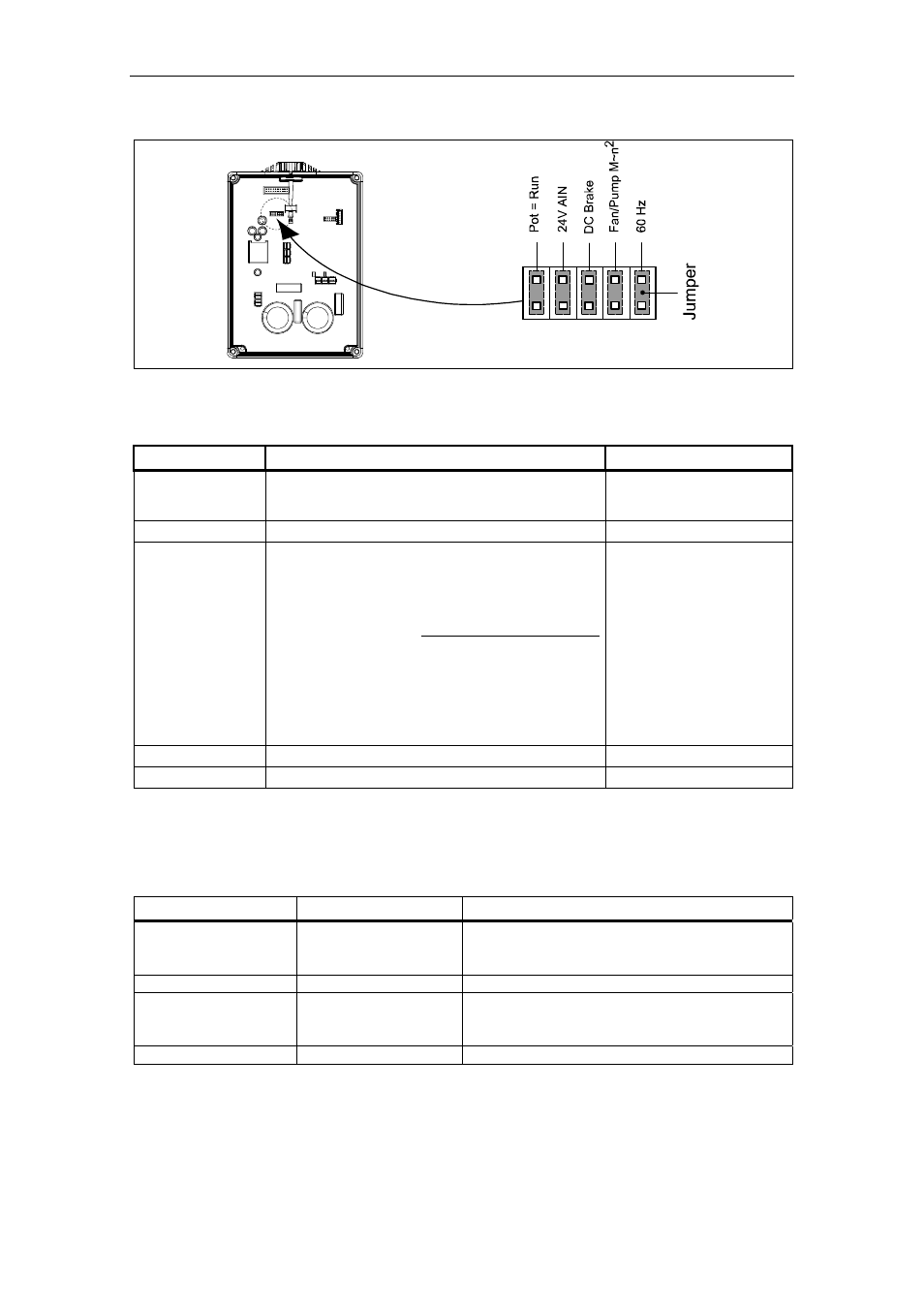
Figure 3-4
Control Circuit Jumpers
Table 3-3
Control Circuit Jumper Settings
Jumper
Jumper Fitted
Jumper Removed
Pot = Run
P0700 = 2
P0705 = 1 (motor potentiometer)
P1210 = 6 automatic restart
P0700 = 2
P0701 = 1
P1210 = 1
24 AIN
No software effect
No software effect
DC Brake
Uses the jumper settings for the ramp settings by the
duration of the direct current braking, to be calculated as
follows.
Duration of direct current braking =
If the drive is quicker to come to a standstill because of the
load conditions, the direct current braking still remains
active fo the calculated time time.
Otherwise the value is held in P1233 (duration of the diret
current braking)
P1233 = 0
Fan/Pump: M~n2
P1300 = 2 (fan curve/quadratic vf)
P1300 = 0 (linear vf)
50/60 Hz
Rated Motor Frequency = 60 Hz
Rated Motor Frequency = 50 Hz
Control Jumpers
In Table 3-4 the behaviour of the Control Jumpers are explained.
Table 3-4
Control Circuit Jumper Behaviour
Status before action(s) Action(s)
Reaction(s) of the inverter
Jumper not fitted
Power down
Fit jumper(s)
Power up
Parameters influenced by jumper will have jumper default
values
Jumper fitted
Cycle power
Parameters influenced by jumper are not changed
Jumper fitted
Power down
Remove jumper
Power up
Parameters influenced by jumper will have “jumper
removed“ default values (normally factory default)
Jumper not fitted
Cycle power
Parameters influenced by jumper are not changed
P0305 (nominal motor current)
r0207 (nominal inverter current)
P1121 (deceleration time) *