2 control circuit jumpers – Siemens MICROMASTER 411 User Manual
Page 47
Issue 03/01
3 Commissioning
MICROMASTER 411 & COMBIMASTER 411 Operating Instructions
6SE6400-5CA00-0BP0
47
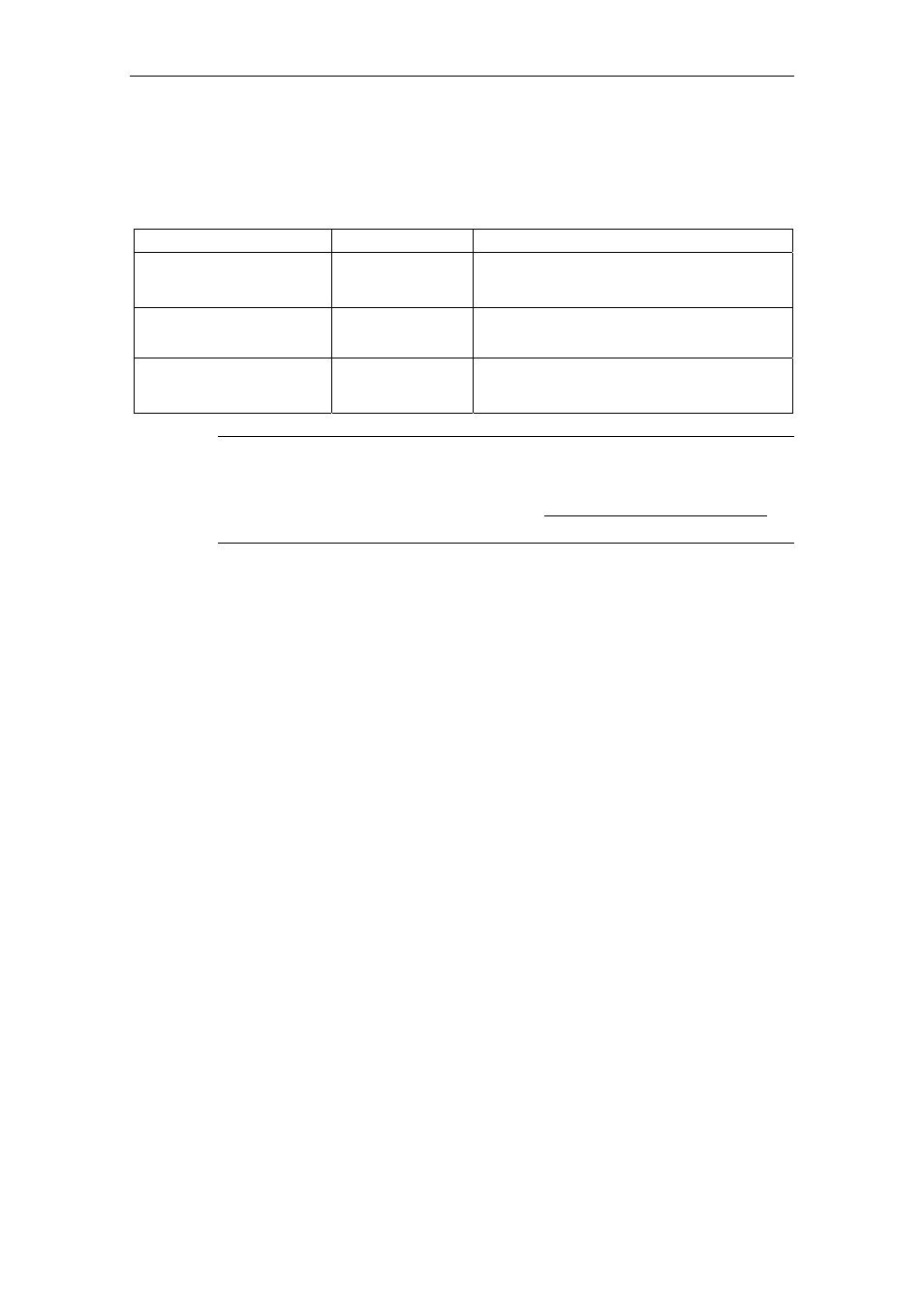
Behaviour of the Ramp Time Jumpers
In Table 3-2 the behaviour of the Ramp Time Jumpers are explained:
Table 3-2
Ramp Time Jumper Behaviour
Status before action(s)
Action(s)
Reaction(s) of the inverter
No jumper fitted
Ramp times have arbitrary setting
Power down
Fit jumper(s)
Power up
Inverter uses the ramp times defined by the current
jumper setting
At least one Jumper fitted
Ramp times have arbitrary setting
Power down
Power up
Inverter uses the ramp times defined by the current
jumper setting
At least one Jumper fitted
Ramp times have arbitrary setting
Power down
Remove jumper(s)
Power up
Inverter uses the ramp times that were used before
removing the jumper(s)
NOTE
The brake time is influenced by the setting for the ramp time (deceleration time).
The following relationship applies:
3.3.2
Control Circuit Jumpers
Control Jumpers (see Table 3-3) are provided for the following functions (fit jumper
to enable function). Jumpers can only be accessed when the cover is removed:
Pot = Run
Enables the control potentiometer as the Command Source (auto restart is
enabled).
24 V AIN
To change analogue input range from 0 –10 V to 0 – 24 V
DC Brake
To change Stop function from OFF1 to DC Brake.
Fan/Pump: M~n2
To change V/f curve from Linear to Quadratic curve.
60 Hz operation
To change motor default settings from 50 Hz to 60 Hz.
Braking time = P1121 (deceleration time) *
P0305 (nominal motor current)
r0207 (nominal inverter current)