Master position filter, Enable check box, Samples – Emerson FM-3 User Manual
Page 59
45
Setting Up Parameters
Master Position Filter
The master filter is designed for applications where the master encoder input requires
smoothing due to low resolution or high gain. These applications include low speed masters,
low resolution master encoders, and large follower to master gear ratios.
Filters inherently introduce phase shift (or delay) in the followers response to the master
position, velocity and acceleration. The FM-3 provides Feedforward compensation to correct
for these delays introduced by the filter.
The user may set the number of filter samples to be used to "smooth" the master encoder
velocity. The more samples used by the filter, the smoother the master velocity signal,
however the more positional delay introduced by the filter. This means that more filtering will
cause more position error between master and follower. Feedforward is used in conjunction
with the filter to provide accurate positioning performance while still maintaining smooth
motion.
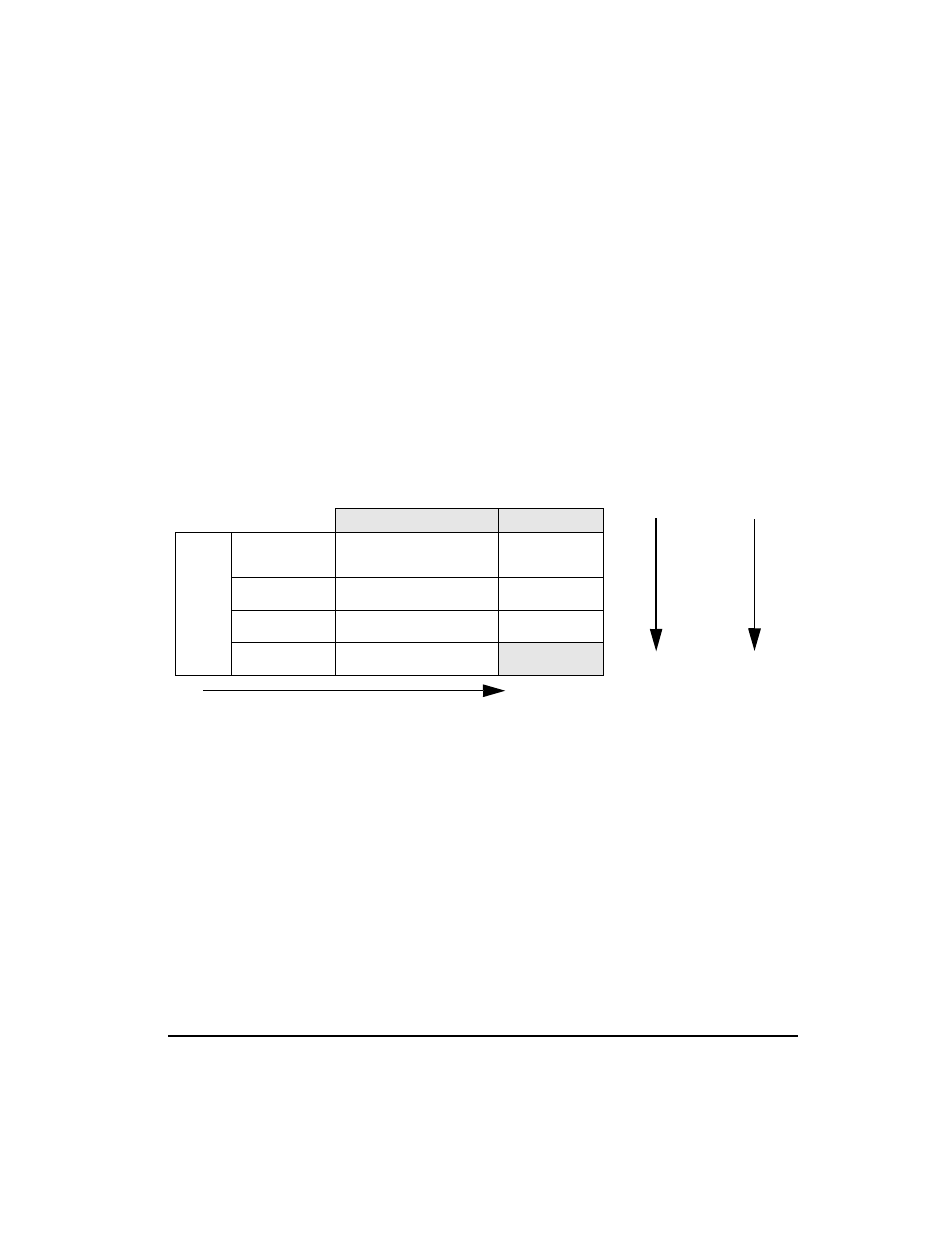
The table below can be used to best determine the proper filter settings for your application.
Filter parameters cannot be changed using the "Update to RAM" feature. Changes must be
fully downloaded before taking effect.
The gray box in the table above denotes the default setting for the master filter parameters.
Enable Check Box
The enable check box is used to turn on or turn off the Master Position Filter. If checked, the
filter is active and the user must select the number of samples used by the filter. If unchecked,
the filter is not used.
Samples
Defines the number of samples used by the filter to smooth the master signal. Increasing the
number of samples increases smoothness, but also increases lag. See Filter table above to
select proper setting.
Feedforward OFF
Feedforward ON
# of
Samples
Disabled
One update of phase shift
(not velocity dependent)
No Filtering
No delay,
No Filtering
4
Small Lag (function of speed),
Low Filtering
Poor at low speed,
Low Filtering
8
Medium Lag (function of speed),
Medium Filtering
Good at low speed,
Medium Filtering
16
Large Lag (function of speed),
High Filtering
Best at low speeds,
High Filtering
Smoother
Increasing Lag
with FF Off
Reduced Lag