Low pass filter group, Line voltage (en only), Determining tuning parameter values – Emerson FM-3 User Manual
Page 232
218
FM-3 Programming Module Reference Manual
Friction parameter is less than the actual friction, velocity error will be reduced but not
eliminated.
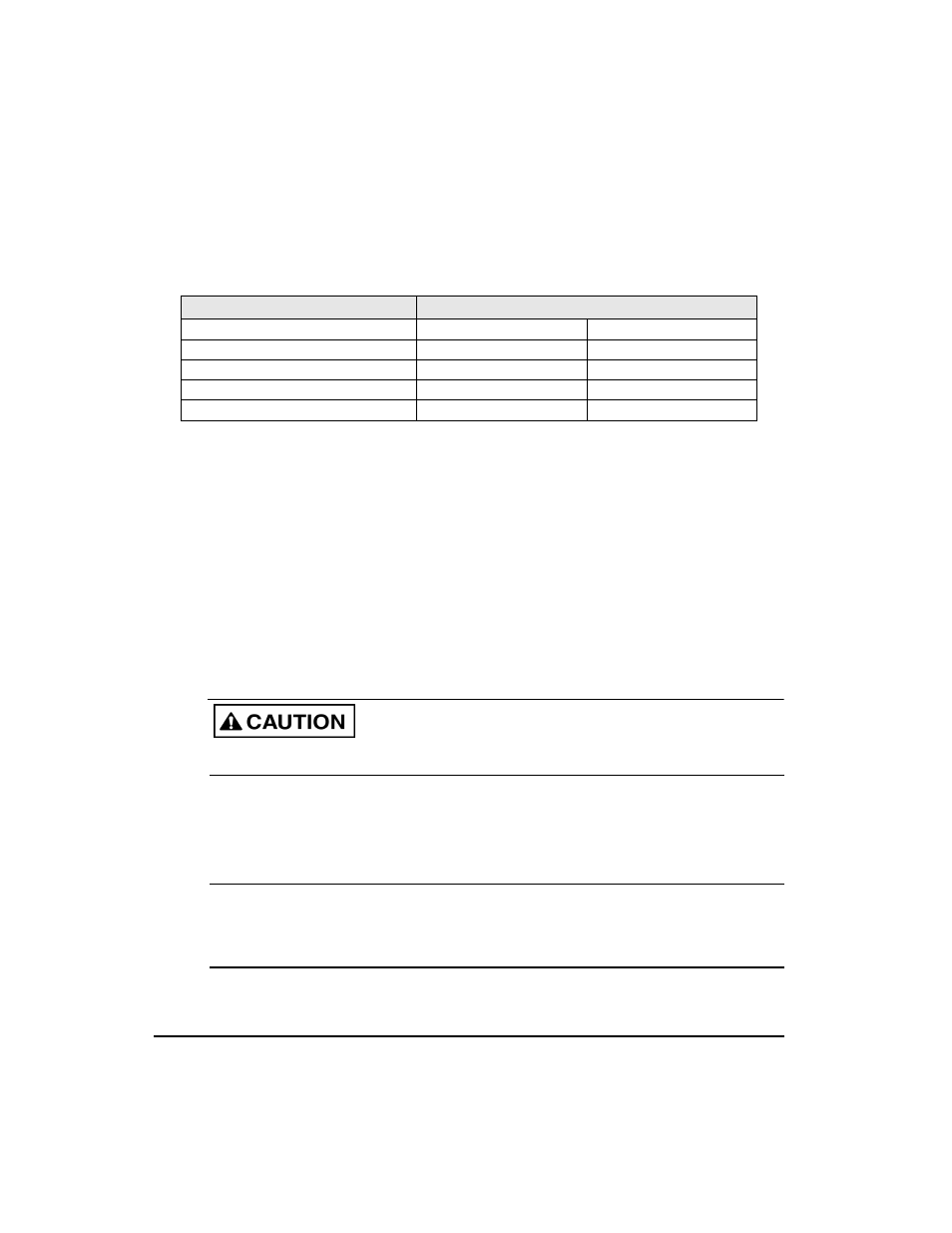
Feedforwards can be enabled in any operating mode, however, there are certain modes in
which they do not function. These modes are described in the table below.
Low Pass Filter Group
The Low Pass Filter will reduce machine resonance due to mechanical coupling and other
flexible drive/load components by filtering the command generated by the velocity loop. A
check box on the Tuning tab enables a low pass filter applied to the output of the velocity
command before the torque compensator. The low pass filter frequency parameter defines
the low pass filter cut-off frequency. Signals exceeding this frequency will be filtered at a
rate of 40 dB per decade. The default value is 600Hz.
Line Voltage (EN Only)
Line Voltage specifies the applied power and adjusts the internal gains to compensate for it.
This parameter has two choices 115 VAC and 230 VAC. If the Line Voltage is set to 230
VAC when the actual applied voltage is 115 VAC, the motor will be slightly less responsive
to commands and load disturbances.
The Line Voltage must never be set to 115 VAC if the applied voltage is actually 230
VAC. This can cause drive instability and failure, resulting in property damage.
Determining Tuning Parameter Values
For optimum performance you will need to enter the actual system parameters into the drive.
This section discusses the methods which will most accurately determine those parameters.
Note
If you have an application which exerts a constant unidirectional loading throughout the
travel such as in a vertical axis, the inertia tests must be performed in both directions to
cancel out the unidirectional loading effect.
Operating Mode
Feedforward Parameters Active
Accel FF
Vel FF
Analog Velocity
No
Yes
Preset Velocity
Yes
Yes
Pulse/Position
No
No
Summation
No
Yes