Guralp Systems CMG-DM24 User Manual
Page 45
Operator’s Guide DM-24 Digitiser
Issue G January 2003
43
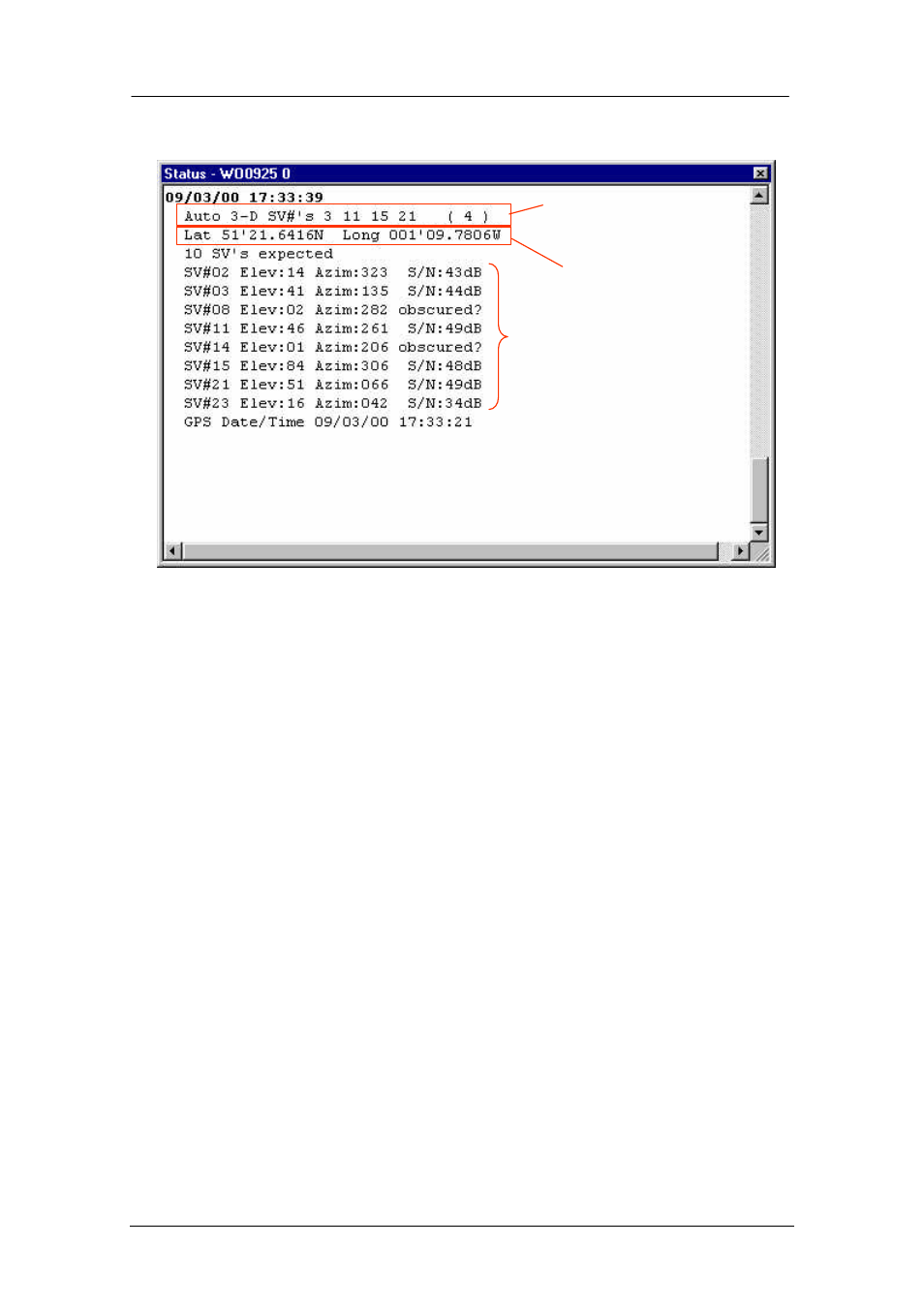
Initial GPS status report will be like this:
If GPS is having difficulty in acquiring satellites there can be a delay of several minutes
before a new message is displayed, but normally if the system has not been moved from
its previous location it should report acquisition of 1 or more satellites and GPS time in
a very short time. The report will also show the satellite numbers and their
corresponding signal strengths.
The internal time synchronisation and control software will wait for the GPS unit to
report a good position fix (requires 3 satellites) before starting operation. The system
actually waits 6 consecutive ‘good’ messages, which normally occur every 10 to 20
seconds.
If GPS maintains a good fix from the satellites available, the system will then switch on
the control process and set the internal clock as shown by the status messages over the
page.
The system jam-sets its internal clock at this point to be synchronised to GPS time and
will also re-synchronise the Analogue to Digital Converters so that the data is accurately
time-stamped to this new reference. The data transmitted up-to this point will be
stamped with the time from the internal back-up ‘Real-Time Clock’ ; this is also now
reset to this accurate time. Re-synchronisation will also result in the received data
showing a discontinuity.
The control process will now attempt to keep the internal time-base synchronised to the
GPS 1 pulse per second output by adjusting the voltage controlled crystal oscillator. The
control algorithm has two stages - initially it compares its internal 1 Hz time-base with
the GPS 1pps and adjusts the voltage control to minimise the error. Once this has been
achieved it then controls the crystal to minimise both the ‘phase error’ (offset between
its internal 1 Hz and GPS) and the drift (frequency error) relative to GPS. During the
3-D position requires minimum
of 3 SV’s (Satellites in View)
4 shown here
Position from GPS
Satellite in View number,
elevation, bearing and
either ‘obscured’ or
Signal/Noise ratio of
signal (30 to 50dB normal)