BECKHOFF BK3xx0 User Manual
Page 53
Notes on the Documentation
Fieldbus Components
51
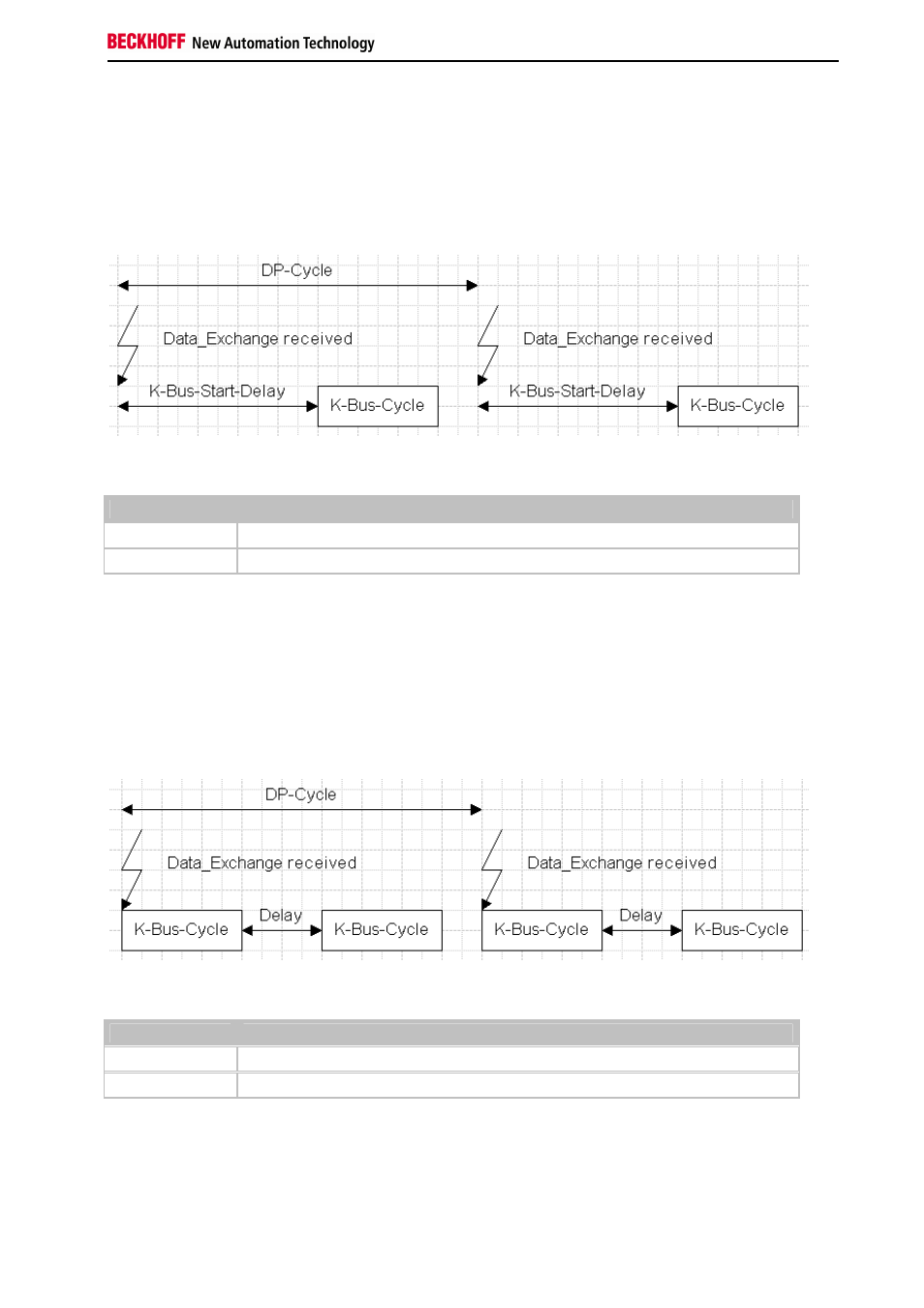
Synchronous mode with optimised input update (one cycle)
In optimised input update, the start of the K-Bus cycle can be delayed following reception of the
Data_Exchange telegram, so that the inputs are more up-to-date than they are in standard synchronous
mode, whereas generation of the outputs is more severely delayed. It is important here to ensure that the
duration of the K-Bus cycle, plus the delay time, plus approx. 20% (to allow for the lower priority
processes on the coupler) is shorter than the DP cycle time (which, under TwinCAT, means the cycle
time of the associated task).
The delay time is set by means of the UserPrmData (in µs, in Motorola format). The extended GSD file of
the Bus Coupler is, however, necessary for this:
Byte
Value: Description
13
Delay time (in µs) high byte
14
Delay time (in µs) low byte
Synchronous mode with optimised input update (two cycles)
In the third mode of synchronous operation, the advantages of the other two operating modes are
combined. Two K-Bus cycles are carried out within one DP cycle. The first cycle begins immediately after
reception of the Data_Exchange telegram from the master, which means that the outputs are generated
as quickly as possible. The second cycle is started after a delay time that begins after completion of the
first cycle has elapsed, so that the inputs are as recent as possible. It is important here to ensure that
twice the duration of the K-Bus cycle, plus the delay time, plus approx. 20% (to allow for the lower priority
processes on the coupler) is shorter than the DP cycle time (which, under TwinCAT, means the cycle
time of the associated task).
The delay time is set by means of the UserPrmData (in µs, in Motorola format). The extended GSD file of
the Bus Coupler is, however, necessary for this:
Byte
Description
13
Delay time (in µs) high byte
14
Delay time (in µs) low byte