Synchronous mode – BECKHOFF BK3xx0 User Manual
Page 52
Notes on the Documentation
50
Fieldbus Components
Fast FreeRun
To avoid the jitter resulting from acyclic communication or events and to achieve fast K-Bus update times,
the Fast FreeRun mode can be activated. The K-Bus cycle is called under time control from a high priority
task. Following completion of the K-Bus cycle, the lower priority tasks (DPV1, KS2000 interface, etc.) are
granted processor time for 12.5% of the duration of the foregoing K-Bus cycle, before the next K-Bus
cycle is started. In fast FreeRun mode therefore the inputs and outputs are tightly up-to-date, but are not
synchronised to the DP cycle:
Synchronous mode
As explained in the table above, there are three different synchronous modes:
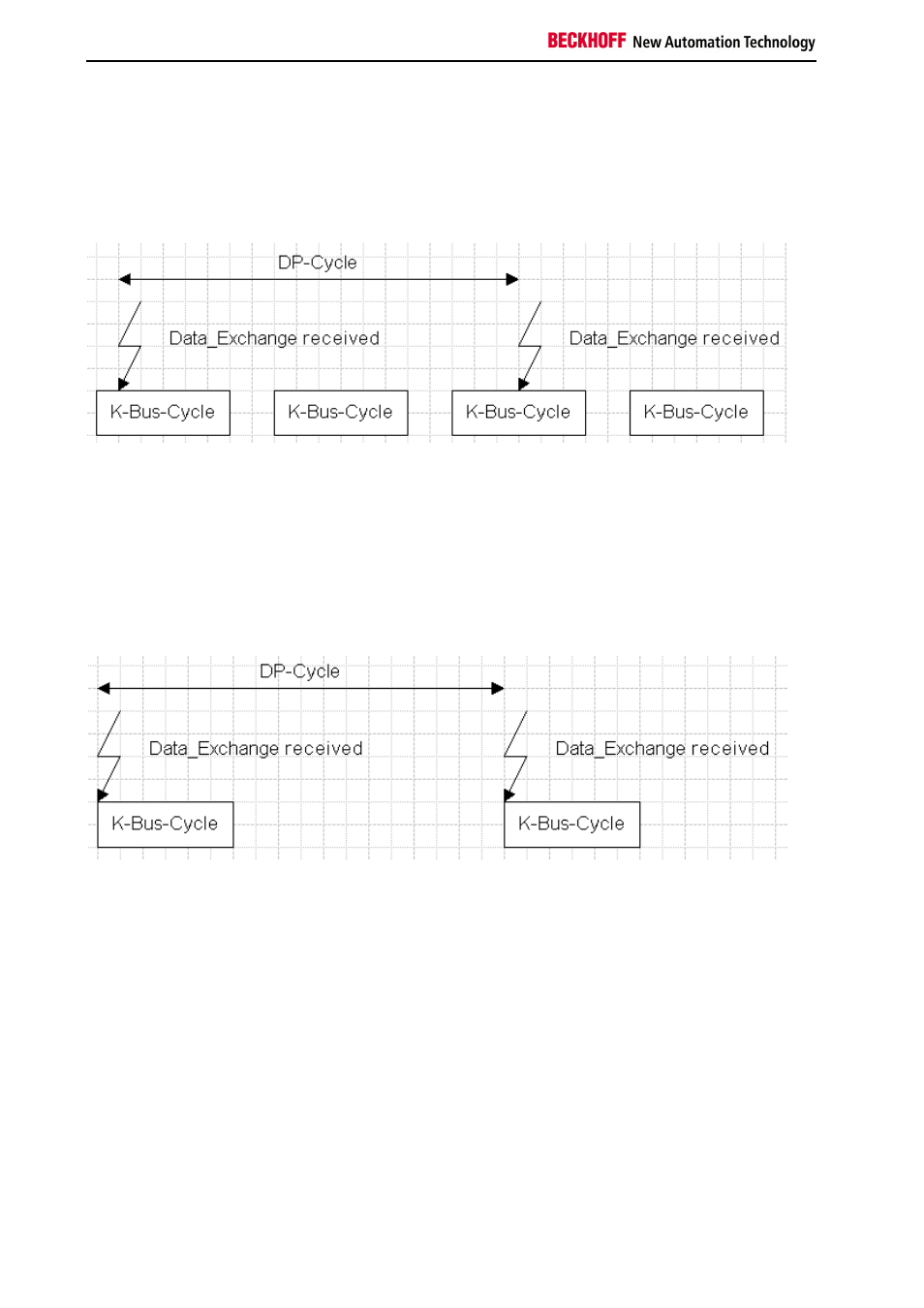
Standard synchronous mode
In standard synchronous mode the K-Bus cycle is always started immediately following reception of the
Data_Exchange telegram from the DP master. The outputs are therefore generated as quickly as
possible, while the input cycles are always one DP cycle old:
It is important here to ensure that the duration of the K-Bus cycle plus approx. 20% (to allow for the lower
priority processes on the coupler) is shorter than the DP cycle time (which, under TwinCAT, means the
cycle time of the associated task).