Pilz PMCprimo DriveP.12/AA0/4/0/0/208-480VAC User Manual
Page 28
9 Project window
9.1.8
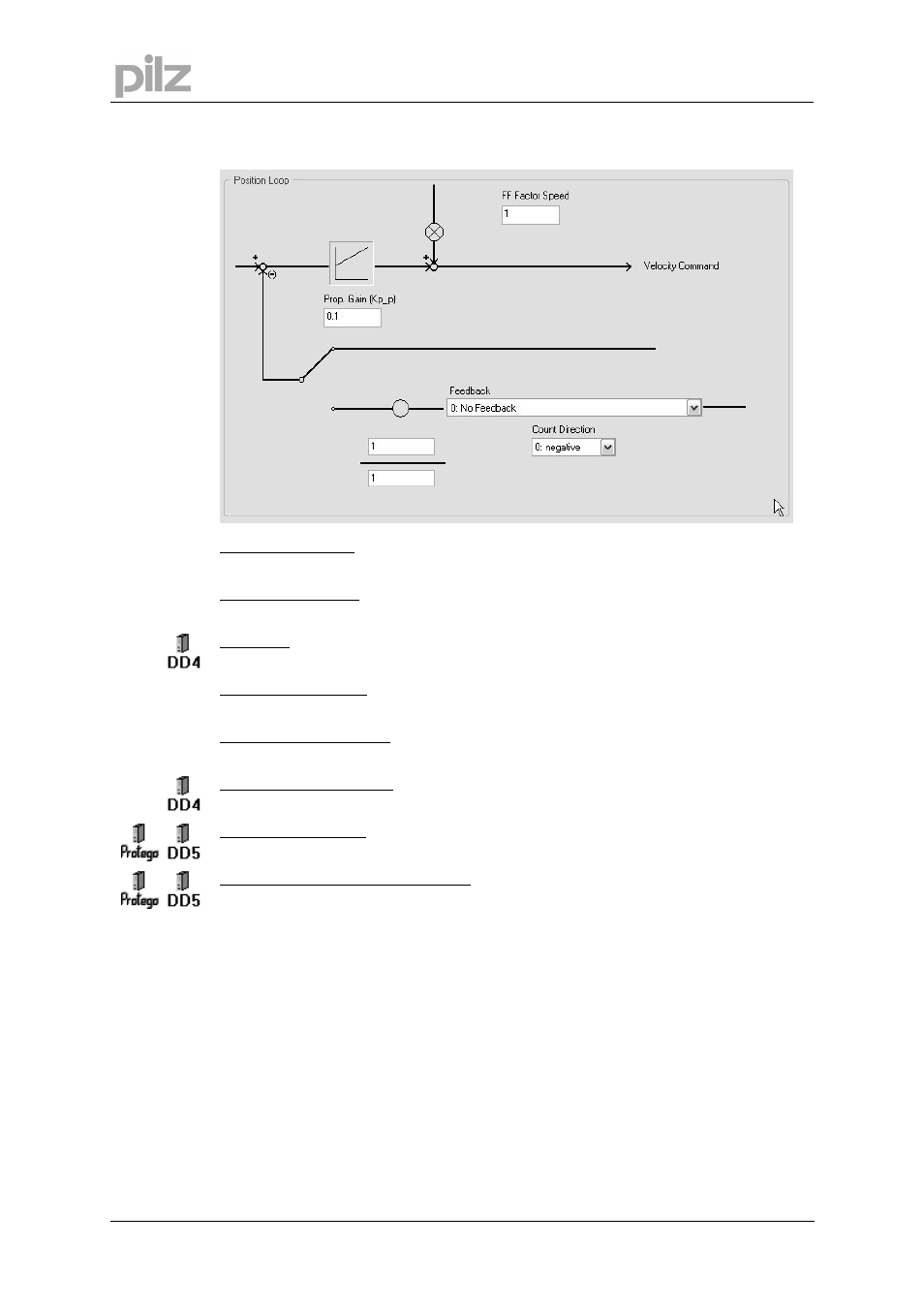
Position controller
Feedback [
EXTPOS
]
The EXTPOS command defines the feedback source for the drive position control loop.
Prop Gain Kp_p [
GP
]
Determines the proportional gain for the position controller.
Tn [
GPTN
] – PMCtendo DD4 only
Determines the integral-action time (integration time constant) for the position controller.
Prop Gain Kp_v [
GPV
]
Determines the proportional gain for the speed section of the controller.
FF-Faktor Speed [
GPFFV
]
Determines the feed-forward factor for the position controller.
FF-Faktor Current [
GPFFT
] – PMCtendo DD4 only
Position control loop: feed forward for the current command.
Count Direction [
DIR
]
– PMCtendo DD5 and PMCprotego D only
The DIR variable defines the count direction for feedback information.
Resolution [
ENCIN
/ EGEARO
/ EGEARI
] – PMCtendo DD5 and PMCprotego D only
ENCIN sets the resolution (number of pulses) of the encoder input channel using a digital
encoder as feedback unit.
In case an external feedback system is used the ratio can be set by EGEARI and EGEARO.
The feedback turn are set by EGEARI the motor turn by EGEARO.
Page 28
User Manual for Setup Software PDrive
- PMCprimo DriveP.03/AA0/4/0/0/208-480VAC PMCprimo DriveP.03/AB0/5/0/0/208-480VAC PMCprimo DriveP.03/AB0/3/0/0/208-480VAC PMCprimo DriveP.12/AB0/2/0/0/208-480VAC PMCprimo DriveP.12/AB0/3/0/0/208-480VAC PMCprimo DriveP.03/AB0/2/0/0/208-480VAC PMCprimo DriveP.12/AAC/4/0/0/208-480VAC PMCprimo DriveP.12/AA0/2/0/0/208-480VAC PMCprotego D.03/000/0/0/2/208-480VAC PMCprotego D.12/000/0/0/2/208-480VAC PMCprotego D.03/010/0/0/2/208-480VAC PMCprotego D.03/200/0/0/2/208-480VAC PMCprotego D.03/100/0/0/2/208-480VAC PMCprotego D.12/010/0/0/2/208-480VAC PMCprotego D.12/200/0/0/2/208-480VAC PMCprotego D.12/100/0/0/2/208-480VAC PMCprimo Drive2.01/21/5/230-480V PMCprimo Drive2.01/11/2/230-480V PMCprimo Drive2.03/11/2/230-480V PMCprimo Drive2.06/11/2/230-480V PMCprimo Drive2.10/11/2/230-480V PMCprimo Drive2.03/21/2/230-480V PMCprimo Drive2.06/21/2/230-480V PMCprimo Drive2.01/11/4/230-480V PMCprimo Drive2.03/16/2/230-480V PMCprimo Drive2.10/16/2/230-480V PMCprimo Drive2.10/25/5/230-480V PMCprimo Drive2.06/11/3/230-480V PMCprimo Drive2.01/11/3/230-480V PMCprimo Drive2.03/11/3/230-480V PMCprimo Drive2.10/23/2/230-480V PMCprimo Drive2.10/21/2/230-480V PMCprimo Drive2.06/23/3/230-480V PMCprimo Drive2.06/21/4/230-480V PMCprimo Drive2.03/21/5/230-480V PMCprimo Drive2.14/11/2/230-480V PMCprimo Drive2.20/21/2/230-480V PMCprimo Drive2.03/21/4/230-480V PMCprimo Drive2.20/22/2/230-480V PMCprimo Drive2.06/21/5/230-480V PMCprimo Drive2.06/21/3/230-480V PMCprimo Drive2.20/21/3/230-480V PMCprimo Drive2.01/21/6/230-480V PMCprimo Drive2.20/26/3/230-480V PMCprimo Drive2.06/23/2/230-480V PMCprimo Drive2.03/25/2/230-480V PMCprimo Drive2.01/21/2/230-480V PMCprimo Drive2.03/23/3/230-480V PMCprimo Drive2.01/21/4/230-480V PMCprimo Drive2.20/21/5/230-480V PMCprimo Drive2.20/11/2/230-480V PMCprimo Drive2.01/23/3/230-480V PMCprimo Drive3.03/11/2/0/0/110-230VAC PMCprimo Drive3.06/11/2/0/0/110-230VAC PMCprimo Drive3.10/11/2/0/0/110-230VAC PMCprimo Drive3.01/11/2/0/0/208-480VAC PMCprimo Drive3.03/11/2/0/0/208-480VAC PMCprimo Drive3.06/11/2/0/0/208-480VAC PMCprimo Drive2.01/25/5/230-480V PMCprimo Drive3.01/21/2/0/0/208-480VAC PMCprimo Drive3.03/21/2/0/0/208-480VAC PMCprimo Drive3.06/21/2/0/0/208-480VAC PMCprimo Drive3.03/21/5/0/0/208-480VAC PMCprimo Drive3.06/21/6/0/0/208-480VAC PMCprimo Drive3.03/11/3/0/0/208-480VAC PMCprimo Drive3.03/21/6/0/0/208-480VAC PMCprimo Drive2.10/21/3/230-480V PMCprimo Drive3.01/21/5/0/0/208-480VAC PMCprimo Drive2.10/21/5/230-480V PMCprimo Drive3.01/11/4/0/0/208-480VAC PMCprimo Drive3.01/21/4/0/0/208-480VAC PMCprimo Drive3.03/21/4/0/0/208-480VAC PMCprimo Drive3.06/21/4/0/0/208-480VAC PMCprimo Drive3.06/21/5/0/0/208-480VAC PMCprimo Drive3.03/21/4/0/0/110-230VAC PMCprimo Drive3.03/25/5/0/0/208-480VAC PMCprimo Drive3.01/21/7/0/0/208-480VAC PMCprimo Drive3.06/21/4/0/0/110-230VAC PMCprimo Drive3.01/25/4/0/0/208-480VAC PMCprimo Drive2.06/25/3/230-480V PMCprimo Drive2.06/24/3/230-480V PMCprimo Drive3.03/11/5/0/0/208-480VAC PMCprimo Drive2.10/16/3/230-480V PMCprimo Drive3.03/11/4/0/0/208-480VAC PMCprimo Drive3.06/21/3/0/0/208-480VAC PMCprimo DriveP.01/AA0/4/0/0/208-480VAC PMCprimo DriveP.01/AA0/5/0/0/208-480VAC PMCprimo DriveP.12/AA0/4/P/0/208-480VAC PMCprimo DriveP.06/AA0/4/0/0/208-480VAC PMCprimo DriveP.24/ABB/4/0/0/208-480VAC PMCprimo DriveP.06/AB0/2/0/0/208-480VAC PMCprimo DriveP.06/AB0/3/0/0/208-480VAC PMCprimo DriveP.12/ABC/4/P/0/208-480VAC PMCprimo DriveP.24/AA0/5/0/0/208-480VAC PMCtendo DD4.10/122/230-480V PMCtendo DD4.01/122/230-480V PMCtendo DD4.03/122/230-480V PMCtendo DD4.06/117/230-480V PMCtendo DD4.40/162/230-480V PMCtendo DD4.01/112/230-480V PMCtendo DD4.70/162/230-480V PMCtendo DD4.20/112/230-480V PMCtendo DD4.10/112/230-480V PMCtendo DD4.06/112/230-480V PMCtendo DD4.03/112/230-480V PMCtendo DD4.14/112/230-480V PMCtendo DD4.20/162/230-480V PMCtendo DD4.03/162/230-480V PMCtendo DD4.10/162/230-480V PMCtendo DD4.14/162/230-480V PMCtendo DD4.06/162/230-480V PMCtendo DD4.03/117/230-480V PMCtendo DD4.01/117/230-480V PMCtendo DD4.10/117/230-480V PMCtendo DD4.10/167/230-480V PMCtendo DD4.06/122/230-480V PMCtendo DD5.03/000/0/0/0/110-230VAC PMCtendo DD5.06/112/115-230VAC PMCtendo DD5.10/000/0/0/0/110-230VAC PMCtendo DD5.01/000/0/0/0/208-480VAC PMCtendo DD5.03/000/0/0/0/208-480VAC PMCtendo DD5.06/000/0/0/0/208-480VAC PMCtendo DD4.06/167/230-480V PMCprotego D.01/000/0/0/2/208-480VAC PMCprotego D.06/000/0/0/2/208-480VAC PMCprotego D.24/000/0/0/2/208-480VAC PMCprotego D.12/000/0/P/2/208-480VAC PMCprotego D.72/000/0/0/2/208-480VAC PMCprotego D.24/000/0/P/2/208-480VAC PMCprotego D.48/000/0/0/2/208-480VAC PMCprotego D.01/200/0/0/2/208-480VAC PMCprotego D.01/100/0/0/2/208-480VAC PMCprotego D.01/010/0/0/2/208-480VAC PMCprotego D.06/010/0/0/2/208-480VAC PMCprotego D.06/100/0/0/2/208-480VAC PMCprotego D.06/200/0/0/2/208-480VAC PMCprotego D.24/200/0/P/2/208-480VAC PMCprotego D.12/010/0/P/2/208-480VAC PMCprotego D.12/200/0/P/2/208-480VAC PMCprotego D.24/100/0/P/2/208-480VAC PMCprotego D.24/010/0/P/2/208-480VAC PMCprotego D.12/100/0/P/2/208-480VAC PMCprotego D.24/200/0/0/2/208-480VAC PMCprotego D.24/100/0/0/2/208-480VAC PMCprotego D.24/010/0/0/2/208-480VAC PMCmotion control tools