Pilz PMCprimo DriveP.12/AA0/4/0/0/208-480VAC User Manual
Page 23
9 Project window
9.1.5
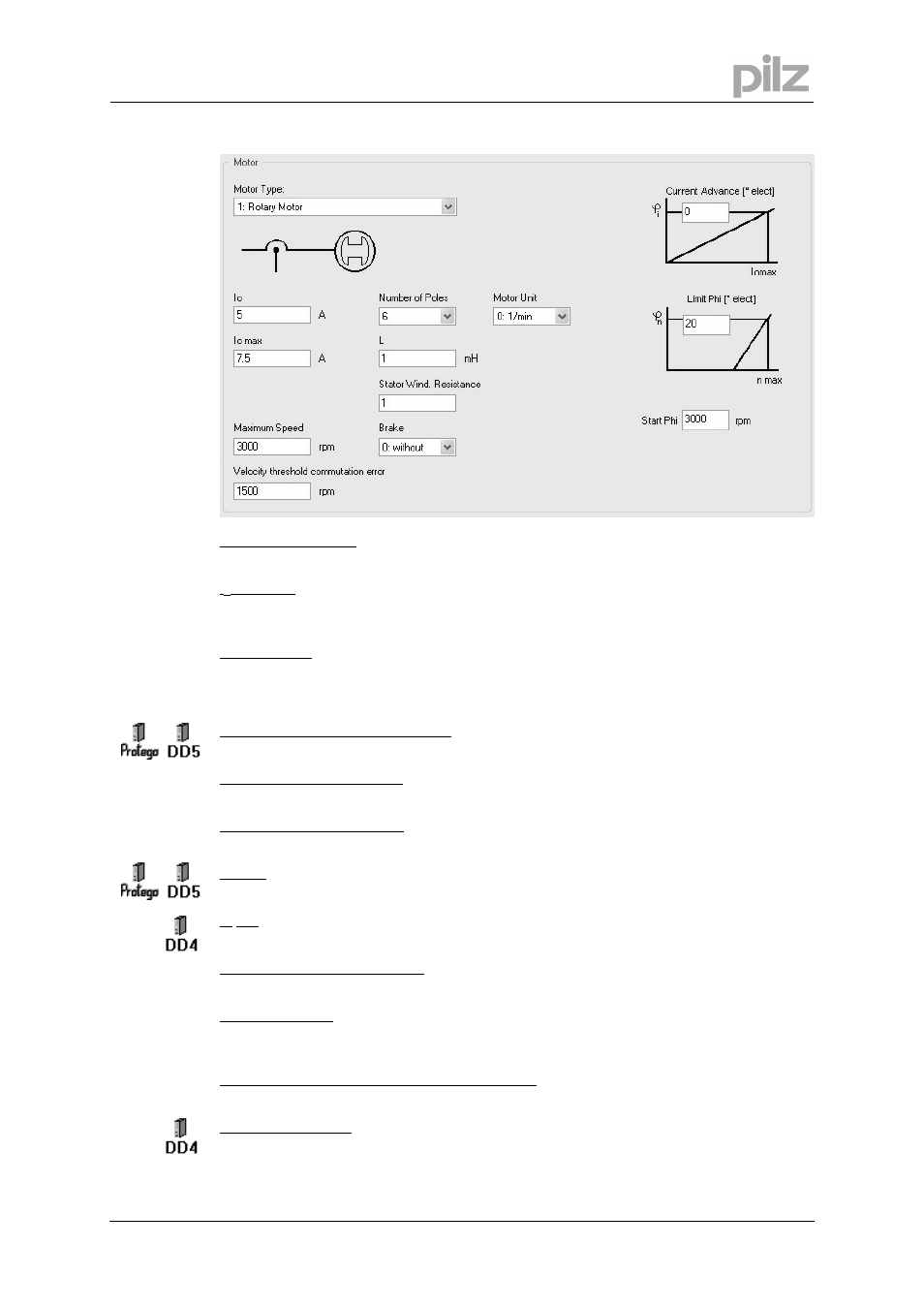
Motor
Motor Type [
MTYPE
]
MTYPE sets the amplifier's control algorithms to different motor types.
I
0
[ MICONT
]
The standstill current is the r.m.s. current value that the motor requires at standstill to produce
the standstill torque (defines the maximum value for the entry of Irms in the current controller).
I
0max
[
MIPEAK
]
The peak current (r.m.s. value) should not exceed 4 x the rated current of the motor. The actual
value is also determined by the peak current of the servo amplifier that is used (defines the
maximum value for the entry of Ipeak in the current controller).
El. Therm. Time Constant [
MTIME
]
– PMCtendo DD5 and PMCprotego D only
Motor thermal time constant to calculate MI2T with MICONT.
Maximum Speed [
MSPEED
]
Maximum permissible speed of the motor. Limits the entry for the parameter SPEED LIMIT.
Number of Poles [
MPOLES
]
The number of motor poles per turn of the motor.
L [
ML
]
-PMCtendo DD5 and PMCprotego D only
Inductance of the motor (phase-phase). You can take this value from the motor manual.
L [ L]
– PMCtendo DD4 only
Inductance of the motor (phase-phase). You can take this value from the motor manual.
Stator Wind. Resistance [
MRS
]
The parameter describes the stator winding resistance phase-phase in Ohm.
Brake [
MBRAKE
]
If you want to operate a 24V holding brake in the motor directly from the servo amplifier, this
parameter can be used to enable the brake function.
Velocity threshold commutation error [
VCOMM
]
Defines the velocity threshold for commutation error monitoring.
Motor Unit [
MUNIT
]
– PMCtendo DD4 only
Unit for all speed-dependent motor parameters.
User Manual for Setup Software PDrive
Page 23
- PMCprimo DriveP.03/AA0/4/0/0/208-480VAC PMCprimo DriveP.03/AB0/5/0/0/208-480VAC PMCprimo DriveP.03/AB0/3/0/0/208-480VAC PMCprimo DriveP.12/AB0/2/0/0/208-480VAC PMCprimo DriveP.12/AB0/3/0/0/208-480VAC PMCprimo DriveP.03/AB0/2/0/0/208-480VAC PMCprimo DriveP.12/AAC/4/0/0/208-480VAC PMCprimo DriveP.12/AA0/2/0/0/208-480VAC PMCprotego D.03/000/0/0/2/208-480VAC PMCprotego D.12/000/0/0/2/208-480VAC PMCprotego D.03/010/0/0/2/208-480VAC PMCprotego D.03/200/0/0/2/208-480VAC PMCprotego D.03/100/0/0/2/208-480VAC PMCprotego D.12/010/0/0/2/208-480VAC PMCprotego D.12/200/0/0/2/208-480VAC PMCprotego D.12/100/0/0/2/208-480VAC PMCprimo Drive2.01/21/5/230-480V PMCprimo Drive2.01/11/2/230-480V PMCprimo Drive2.03/11/2/230-480V PMCprimo Drive2.06/11/2/230-480V PMCprimo Drive2.10/11/2/230-480V PMCprimo Drive2.03/21/2/230-480V PMCprimo Drive2.06/21/2/230-480V PMCprimo Drive2.01/11/4/230-480V PMCprimo Drive2.03/16/2/230-480V PMCprimo Drive2.10/16/2/230-480V PMCprimo Drive2.10/25/5/230-480V PMCprimo Drive2.06/11/3/230-480V PMCprimo Drive2.01/11/3/230-480V PMCprimo Drive2.03/11/3/230-480V PMCprimo Drive2.10/23/2/230-480V PMCprimo Drive2.10/21/2/230-480V PMCprimo Drive2.06/23/3/230-480V PMCprimo Drive2.06/21/4/230-480V PMCprimo Drive2.03/21/5/230-480V PMCprimo Drive2.14/11/2/230-480V PMCprimo Drive2.20/21/2/230-480V PMCprimo Drive2.03/21/4/230-480V PMCprimo Drive2.20/22/2/230-480V PMCprimo Drive2.06/21/5/230-480V PMCprimo Drive2.06/21/3/230-480V PMCprimo Drive2.20/21/3/230-480V PMCprimo Drive2.01/21/6/230-480V PMCprimo Drive2.20/26/3/230-480V PMCprimo Drive2.06/23/2/230-480V PMCprimo Drive2.03/25/2/230-480V PMCprimo Drive2.01/21/2/230-480V PMCprimo Drive2.03/23/3/230-480V PMCprimo Drive2.01/21/4/230-480V PMCprimo Drive2.20/21/5/230-480V PMCprimo Drive2.20/11/2/230-480V PMCprimo Drive2.01/23/3/230-480V PMCprimo Drive3.03/11/2/0/0/110-230VAC PMCprimo Drive3.06/11/2/0/0/110-230VAC PMCprimo Drive3.10/11/2/0/0/110-230VAC PMCprimo Drive3.01/11/2/0/0/208-480VAC PMCprimo Drive3.03/11/2/0/0/208-480VAC PMCprimo Drive3.06/11/2/0/0/208-480VAC PMCprimo Drive2.01/25/5/230-480V PMCprimo Drive3.01/21/2/0/0/208-480VAC PMCprimo Drive3.03/21/2/0/0/208-480VAC PMCprimo Drive3.06/21/2/0/0/208-480VAC PMCprimo Drive3.03/21/5/0/0/208-480VAC PMCprimo Drive3.06/21/6/0/0/208-480VAC PMCprimo Drive3.03/11/3/0/0/208-480VAC PMCprimo Drive3.03/21/6/0/0/208-480VAC PMCprimo Drive2.10/21/3/230-480V PMCprimo Drive3.01/21/5/0/0/208-480VAC PMCprimo Drive2.10/21/5/230-480V PMCprimo Drive3.01/11/4/0/0/208-480VAC PMCprimo Drive3.01/21/4/0/0/208-480VAC PMCprimo Drive3.03/21/4/0/0/208-480VAC PMCprimo Drive3.06/21/4/0/0/208-480VAC PMCprimo Drive3.06/21/5/0/0/208-480VAC PMCprimo Drive3.03/21/4/0/0/110-230VAC PMCprimo Drive3.03/25/5/0/0/208-480VAC PMCprimo Drive3.01/21/7/0/0/208-480VAC PMCprimo Drive3.06/21/4/0/0/110-230VAC PMCprimo Drive3.01/25/4/0/0/208-480VAC PMCprimo Drive2.06/25/3/230-480V PMCprimo Drive2.06/24/3/230-480V PMCprimo Drive3.03/11/5/0/0/208-480VAC PMCprimo Drive2.10/16/3/230-480V PMCprimo Drive3.03/11/4/0/0/208-480VAC PMCprimo Drive3.06/21/3/0/0/208-480VAC PMCprimo DriveP.01/AA0/4/0/0/208-480VAC PMCprimo DriveP.01/AA0/5/0/0/208-480VAC PMCprimo DriveP.12/AA0/4/P/0/208-480VAC PMCprimo DriveP.06/AA0/4/0/0/208-480VAC PMCprimo DriveP.24/ABB/4/0/0/208-480VAC PMCprimo DriveP.06/AB0/2/0/0/208-480VAC PMCprimo DriveP.06/AB0/3/0/0/208-480VAC PMCprimo DriveP.12/ABC/4/P/0/208-480VAC PMCprimo DriveP.24/AA0/5/0/0/208-480VAC PMCtendo DD4.10/122/230-480V PMCtendo DD4.01/122/230-480V PMCtendo DD4.03/122/230-480V PMCtendo DD4.06/117/230-480V PMCtendo DD4.40/162/230-480V PMCtendo DD4.01/112/230-480V PMCtendo DD4.70/162/230-480V PMCtendo DD4.20/112/230-480V PMCtendo DD4.10/112/230-480V PMCtendo DD4.06/112/230-480V PMCtendo DD4.03/112/230-480V PMCtendo DD4.14/112/230-480V PMCtendo DD4.20/162/230-480V PMCtendo DD4.03/162/230-480V PMCtendo DD4.10/162/230-480V PMCtendo DD4.14/162/230-480V PMCtendo DD4.06/162/230-480V PMCtendo DD4.03/117/230-480V PMCtendo DD4.01/117/230-480V PMCtendo DD4.10/117/230-480V PMCtendo DD4.10/167/230-480V PMCtendo DD4.06/122/230-480V PMCtendo DD5.03/000/0/0/0/110-230VAC PMCtendo DD5.06/112/115-230VAC PMCtendo DD5.10/000/0/0/0/110-230VAC PMCtendo DD5.01/000/0/0/0/208-480VAC PMCtendo DD5.03/000/0/0/0/208-480VAC PMCtendo DD5.06/000/0/0/0/208-480VAC PMCtendo DD4.06/167/230-480V PMCprotego D.01/000/0/0/2/208-480VAC PMCprotego D.06/000/0/0/2/208-480VAC PMCprotego D.24/000/0/0/2/208-480VAC PMCprotego D.12/000/0/P/2/208-480VAC PMCprotego D.72/000/0/0/2/208-480VAC PMCprotego D.24/000/0/P/2/208-480VAC PMCprotego D.48/000/0/0/2/208-480VAC PMCprotego D.01/200/0/0/2/208-480VAC PMCprotego D.01/100/0/0/2/208-480VAC PMCprotego D.01/010/0/0/2/208-480VAC PMCprotego D.06/010/0/0/2/208-480VAC PMCprotego D.06/100/0/0/2/208-480VAC PMCprotego D.06/200/0/0/2/208-480VAC PMCprotego D.24/200/0/P/2/208-480VAC PMCprotego D.12/010/0/P/2/208-480VAC PMCprotego D.12/200/0/P/2/208-480VAC PMCprotego D.24/100/0/P/2/208-480VAC PMCprotego D.24/010/0/P/2/208-480VAC PMCprotego D.12/100/0/P/2/208-480VAC PMCprotego D.24/200/0/0/2/208-480VAC PMCprotego D.24/100/0/0/2/208-480VAC PMCprotego D.24/010/0/0/2/208-480VAC PMCmotion control tools