Rockwell Automation Motion Control PTO Application Building Block User Manual
Page 60
60
Rockwell Automation Publication CC-QS033A-EN-P - February 2014
Appendix A Kinetix 3 Drive Component-class User-defined Functional Block
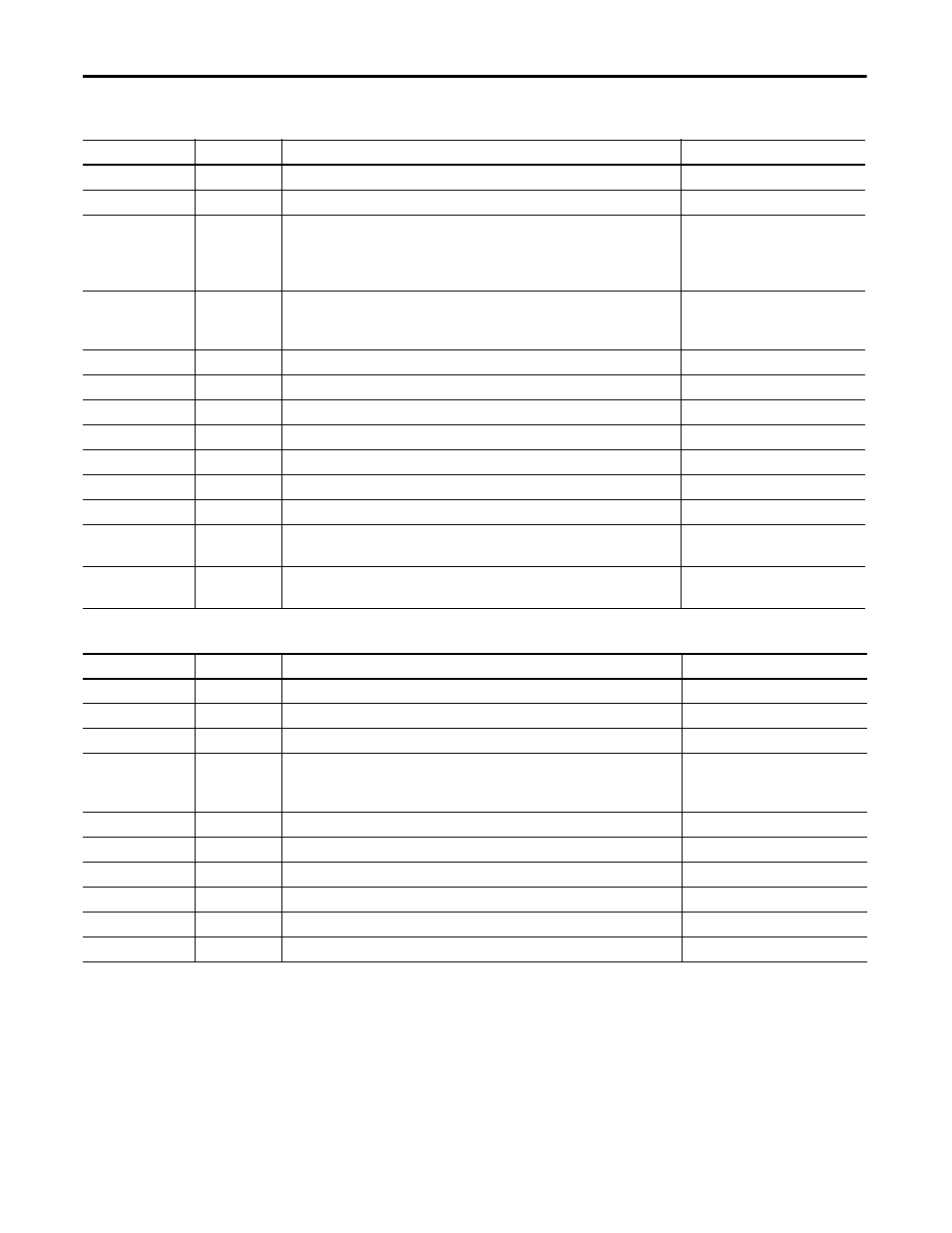
Table 7 - RA_Motion_Move_Cmd Inputs
Table 8 - RA_Motion_Move_Cmd Outputs
Variable
Data type
Description
Range
FBEN
BOOL
Set this bit TRUE to enable the function block.
0, 1
AxisIn
Axis_Ref
Assign this to the motion axis created via the configurator.
—
MoveMode
INT
0: Maintenance mode, Jogging is permitted.
1: Velocity control, Motion is in Velocity Move mode.
2: Absolute control, Motion is in Absolute Position Move mode.
3: Relative control, Motion is in Relative Position Move mode.
0…3
PositionData
Real
Valid only in Mode 2 and 3.
2: Absolute position.
3: Relative position.
-3.40282347E+38…3.40282347E+38
VelocityData
Real
This value sets the speed of the motor.
-3.40282347E+38…3.40282347E+38
AccData
Real
This value sets the acceleration of the motor.
-3.40282347E+38…3.40282347E+38
DecData
Real
This value sets the deceleration of the motor.
-3.40282347E+38…3.40282347E+38
JerkData
Real
This value sets the jerk of the motor.
-3.40282347E+38…3.40282347E+38
DirData
SINT
Valid only in Velocity control mode. This value sets the rotating direction of the motor.
-128…127
Execute
BOOL
Set this bit TRUE to execute motion.
0, 1
Halt
BOOL
Set this bit TRUE to stop motion.
0, 1
Jog_Positive
BOOL
Set this bit TRUE to execute jog in the positive direction.
Set this bit FALSE stops jog.
0, 1
Jog_Negative
BOOL
Set this bit TRUE to execute jog in the negative direction.
Set this bit FALSE stops jog.
0, 1
Variable
Data type
Description
Range
FBENO
BOOL
This variable reflects the state of FBEN.
0, 1
AxisState
USINT
This value returns the status of the axis with respect to the motion currently in progress.
0…7
CurrentMoveMode
INT
This value returns the Current Move mode.
0…3
MoveDone
BOOL
When Move mode is:
0 or 1: This bit is TRUE when the motor has reached the set velocity.
2 or 3: This bit is TRUE when the motion is complete.
0, 1
MoveBusy
BOOL
This bit is TRUE when the motion axis is busy.
0, 1
MoveActive
BOOL
This bit is TRUE when the function block is in control of the axis.
0, 1
MoveAborted
BOOL
This bit is TRUE when the command was aborted by another command.
0, 1
Error
BOOL
This bit is TRUE when an error was detected.
0, 1
ErrorID
UINT
This value returns the motion error code.
—
ErrorMsg
String
This value returns the command that caused the error.
—