Explore the advance move screen – Rockwell Automation Motion Control PTO Application Building Block User Manual
Page 53
Rockwell Automation Publication CC-QS033A-EN-P - February 2014
53
System Validation Chapter 2
3. Type the following for HSC configuration.
4. Press the Enable button.
The HSC status displays the following.
5. Press the X button.
You are returned to Axis Configuration Screen.
6. Press X button again.
7. You are returned to Command & Status Screen.
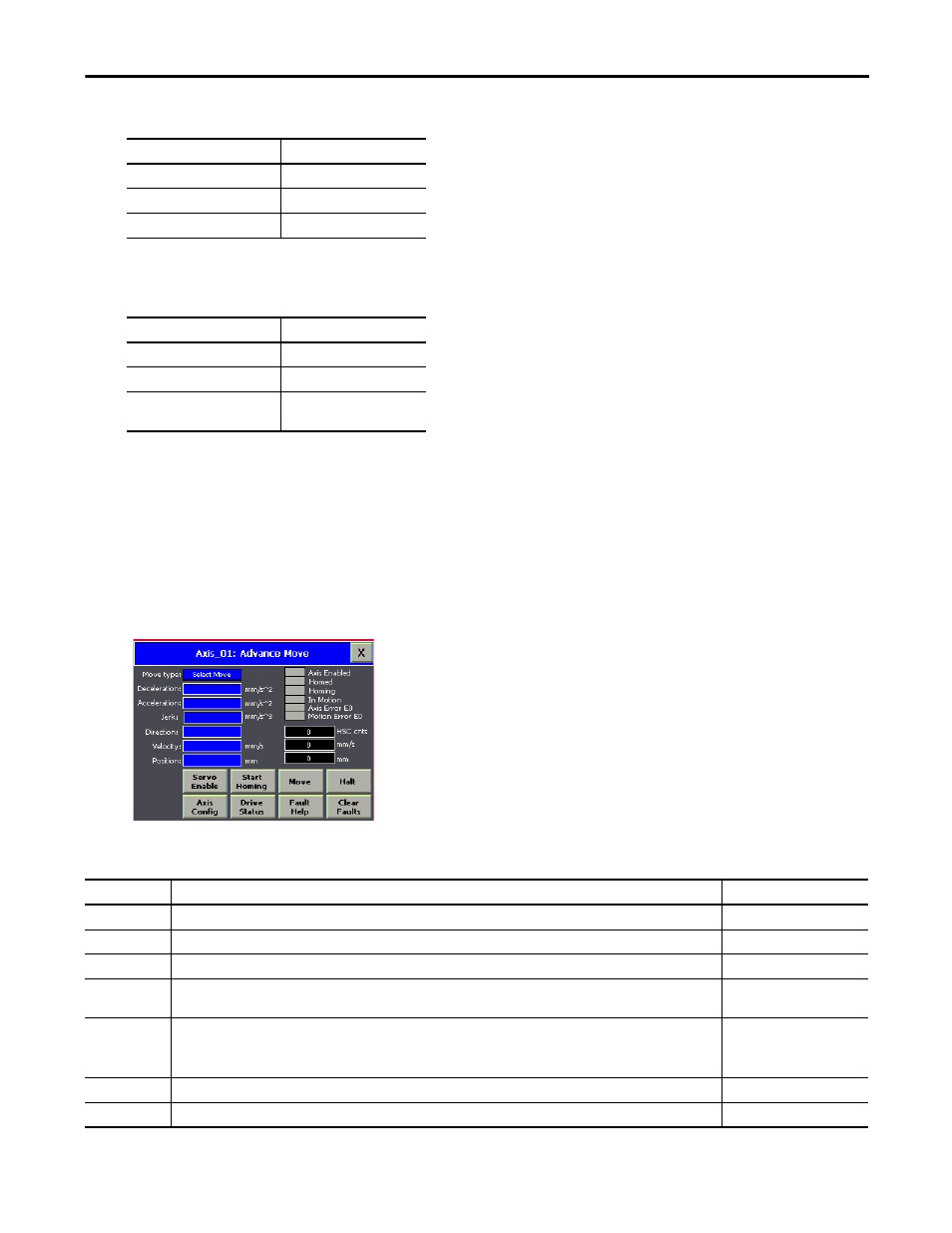
Explore the Advance Move Screen
The left side shows the servo status indicators describe below.
Attribute
Setting
HSC ID
2
HSC mode
6
Initial Pos
0
Attribute
Setting
HSC Rdy
HSC On
HSC Err
No Fault
HSC Cnt
0 (the value changes as you
rotate your encoder)
Parameter
Description
Range
Move type
This is a multi-selection button. Press this button to switch between Select Move, Velocity, Absolute, and Relative move types.
0… 3
Deceleration
This parameter is the deceleration rate that is used for any move command initiated, in mm/s
2
.
0… 90,000
Acceleration
This parameter is the acceleration rate that is used for any move command initiated, in mm/s
2
.
0… 90,000
Jerk
This parameter is the rate of acceleration or deceleration used for any move command initiated. A 0 value denotes a trapezoidal
motion profile.
0… 90,000
Direction
This parameter controls the direction for velocity move.
1 = Positive direction
-1 = Negative direction
0 = Follow previous direction
Velocity
This parameter is the velocity for any move command initiated, in mm/s.
0… 833
Position
This parameter determines the position value and reference for relative and absolute position control respectively.
—