Explore the command and status screen – Rockwell Automation Motion Control PTO Application Building Block User Manual
Page 48
48
Rockwell Automation Publication CC-QS033A-EN-P - February 2014
Chapter 2 System Validation
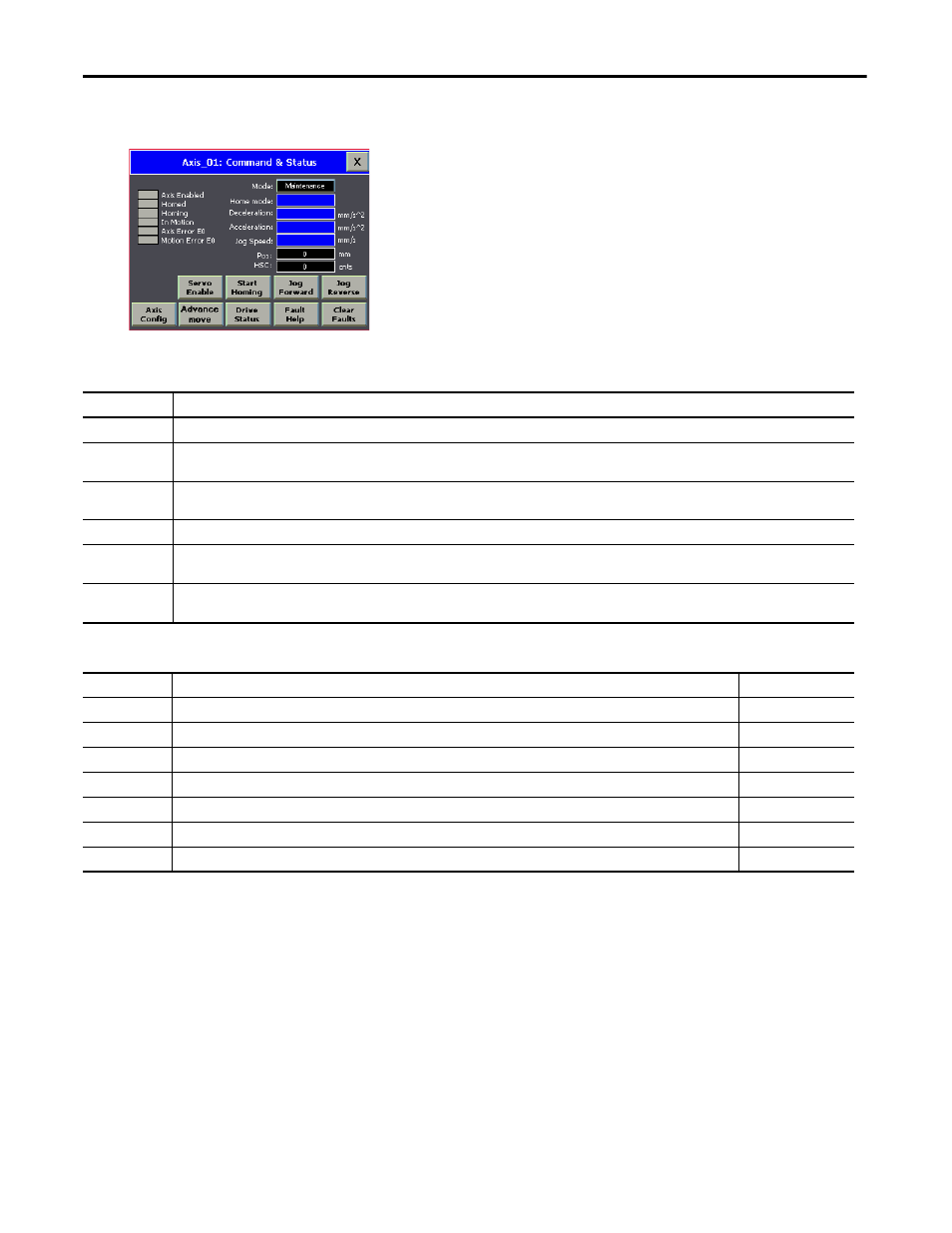
Explore the Command and Status Screen
The left side shows the servo status indicator is describe here.
The right side shows some numeric displays and inputs described below.
Parameter
Description
Axis Enabled
This status indicator displays whether the axis is active and the drive is maintaining control of the motor.
Homed
This status indicator displays the home status of the drive. If the status indicator is green, the drive has an absolute position reference. When the box is gray,
the drive is not homed.
Homing
This status indicator displays the homing status of the drive. When the status indicator is green, the drive has started homing and has not yet attained an
absolute position reference, otherwise, the status indicator is gray.
In Motion
When is status indicator is green the axis is moving,
Axis Error
When this status indicator is gray the motion axis is healthy. When the status indicator is red, there is a fault on the motion axis and the error number is shown
in the text.
Motion Error
When this status indicator is gray the instruction has been executed properly, When the status indicator is red, there is instruction execution fault and the error
number is shown in the text.
Parameter
Description
Range
Mode
The machine is able to jog when in Maintenance mode.
—
Home Mode
There are five different types of homing methods. For more information, refer to the help for MC_Home instruction.
0… 4
Deceleration
This is the deceleration rate that is used for jogging, in mm/s
2
.
0… 90,000
Acceleration
This is the acceleration rate that is used for jogging, in mm/s
2
.
0… 90,000
Jog Speed
This is the velocity for the jog axis, in mm/s.
0… 833
Position
This displays the axis position. Homing resets the axis position to the home value.
—
HSC
This displays High Speed Counter value if an encoder is properly wired and configured to the controller.
—