Appendix b, Interconnect diagrams, Introduction – Rockwell Automation LDC Iron Core Linear Servo Motors User Manual
Page 79: Wiring examples, Introduction wiring examples, Appendix
Rockwell Automation Publication LDC-UM001B-EN-P - March 2011
79
Appendix
B
Interconnect Diagrams
Introduction
This appendix provides wring examples to assist you in wring an LDC-Series
linear motor to an Allen-Bradley drive.
Wiring Examples
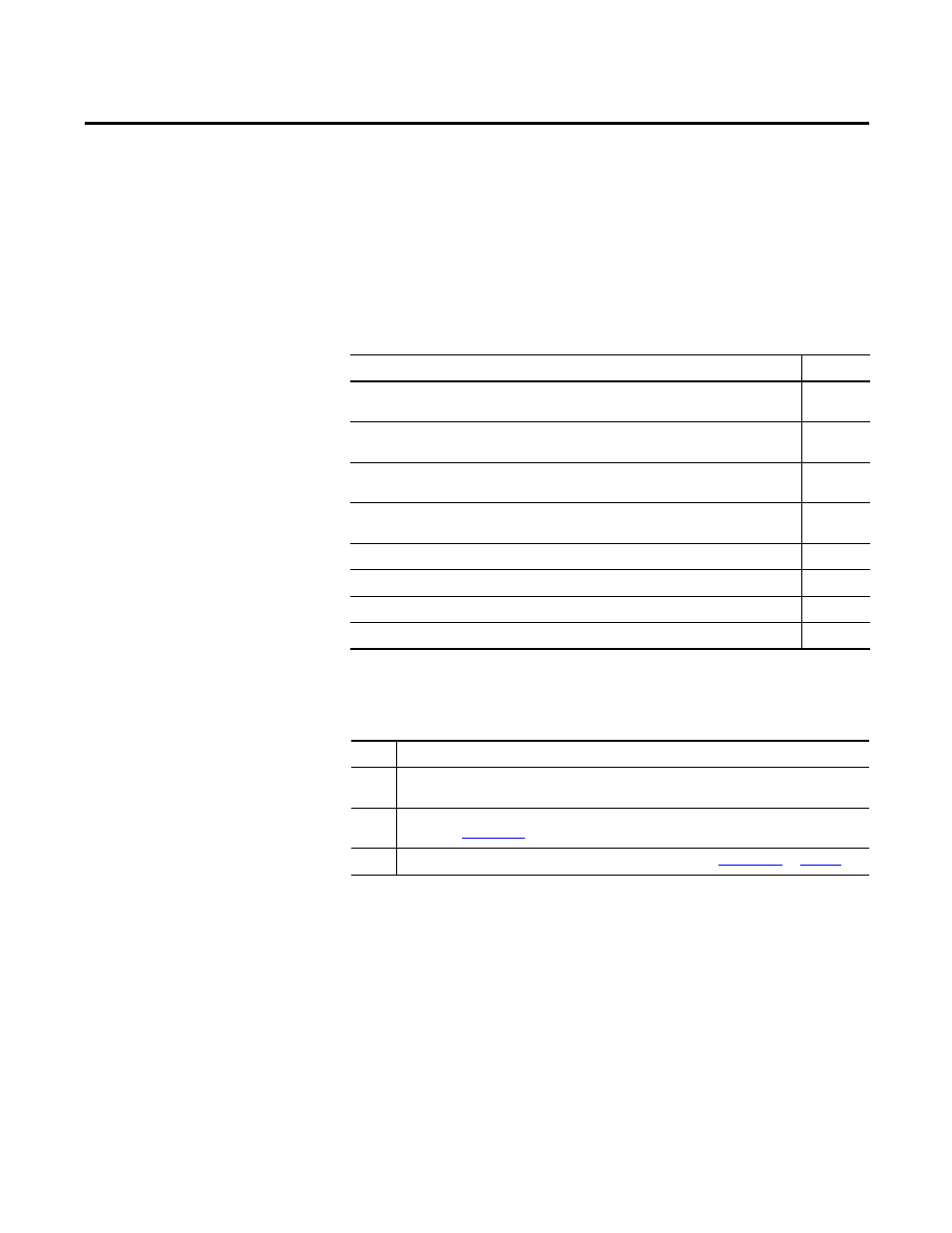
These notes apply to the wiring examples on the pages that follow.
Topic
Page
Kinetix 6000, Kinetix 6500/6200 or Kinetix 2000 Drives and LDC-xxxxxxx-xHT11 Linear
Motor with a TTL Encoder
80
Kinetix 6000, Kinetix 6500/6200 o or Kinetix 2000 Drives and LDC-xxxxxxx-xHT11 Linear
Motor with a Sin/Cos Encoder
81
Kinetix 6000, Kinetix 6500/6200 o or Kinetix 2000 Drives and LDC-xxxxxxx-xHT20 Linear
Motor with a TTL Encoder
82
Kinetix 6000 or Kinetix 2000 Drives and LDC-xxxxxxx-xHT20 Linear Motor with a
Sin/Cos Encoder
83
Ultra3000 Drives and LDC-xxxxxxx-xHT11 Linear Motor with a TTL Encoder
84
Ultra3000 Drives and LDC-xxxxxxx-xHT11 Linear Motor with a Sin/Cos Encoder
85
Ultra3000 Drives and LDC-xxxxxxx-xHT20 Linear Motor with a TTL Encoder
86
Ultra3000 Drives and LDC-xxxxxxx-xHT20 Linear Motor with a Sin/Cos Encoder
87
Note
Information
1
Use cable shield clamp in order to meet CE requirements. No external connection to ground
is required.
2
For motor cable specifications, refer to the Kinetix Motion Control Selection Guide,
publicatio
.
3
When using Sin/Cos encoder with Kinetix 6000 drives refer to