Real time sampling – Rockwell Automation 1771-IL/B , D17716.5.91 ISOLATED ANALOG INPUT Module User Manual
Page 29
Module Configuration
Chapter 4
4-5
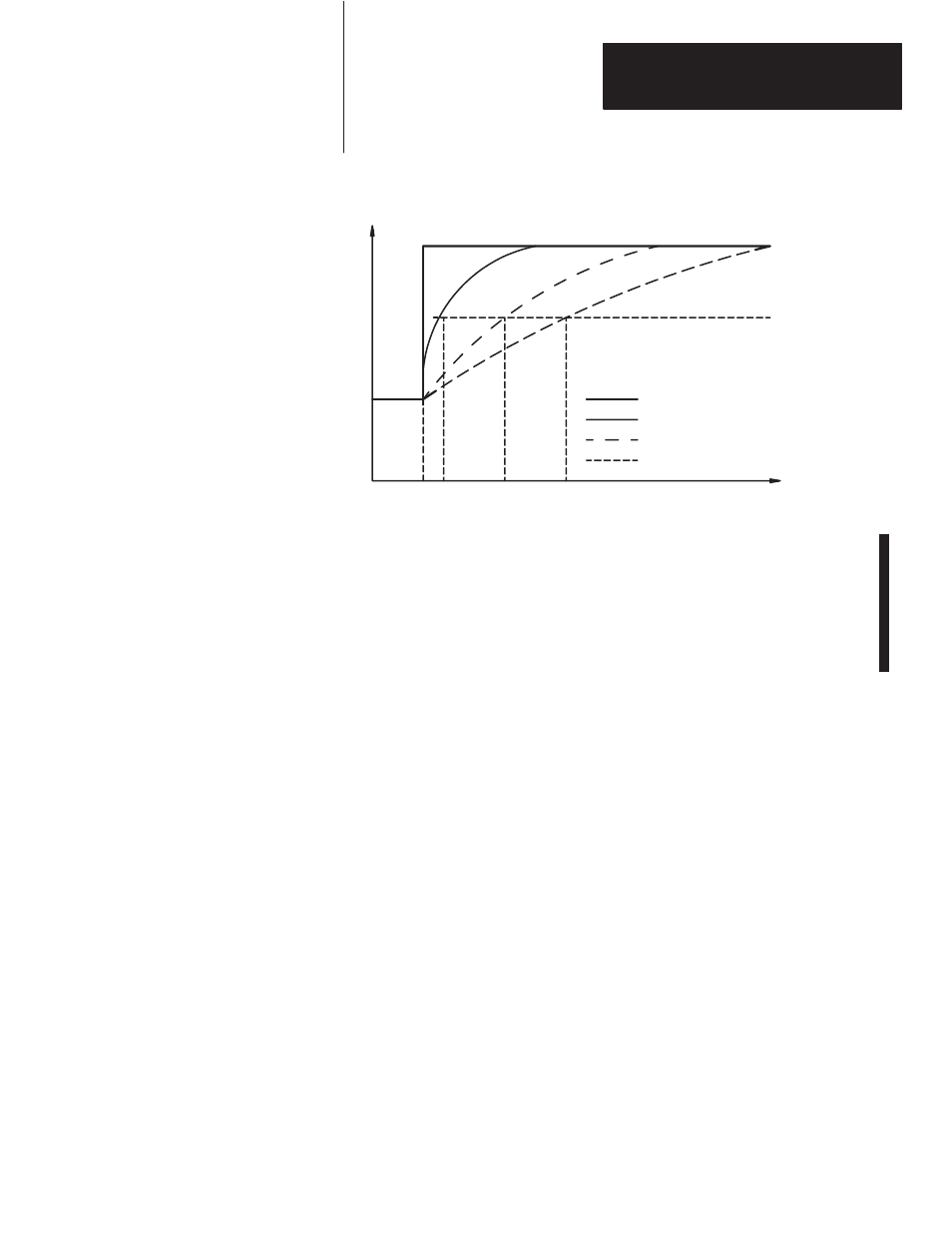
Figure 4.2
Digital Filter Lag Equation Illustration
100%
63%
0
0.01
0.5
0.99
Time in Seconds
16723
TA = 0.99 sec
TA = 0.5 sec
TA = 0.01 sec
Unfiltered Input
0
Amplitude
Digital filter time constant values of .00 BCD to .99 BCD (0.00 to 2.55
binary) (.00 = no filter) are set in bits 00 through 07 of word 3 of the block
transfer write instruction. If an invalid digital filter value is entered
(i.e., .1F BCD), the invalid filter value bit in the block transfer read status
area will be set. If an invalid digital filter value is entered, the module will
not perform digital filtering. If you choose to use the digital filtering
feature, the filter time constant value chosen will apply to all input signals.
The real time sampling (RTS) mode of operation provides data gathered at
precisely timed intervals for use by the processor.
Use RTS for time based functions (such as PID and totalization) in the
PLC. RTS allows accurate time based calculations in local or remote I/O
racks. In the RTS mode the module scans and updates its inputs at a user
defined time interval (T) instead of the default interval. The module
ignores block transfer read (BTR) requests for data until the sample time
period elapses. The BTR of a particular data set occurs only once at the
end of the sample period and subsequent requests for transferred data are
ignored by the module until a new data set is available. If a BTR does not
occur before the the end of the next RTS period, a time-out bit is set in the
BTR status area. When set, this bit indicates that at least one data set was
not transferred to the processor. (The actual number of data sets missed is
unknown.) The time-out bit is reset at the completion of the next BTR.
Real Time Sampling