Appendix d block diagrams d-2 – Rockwell Automation 1391 USER MNL/DIGITAL AC SERVO DR User Manual
Page 128
Appendix D
Block Diagrams
D-2
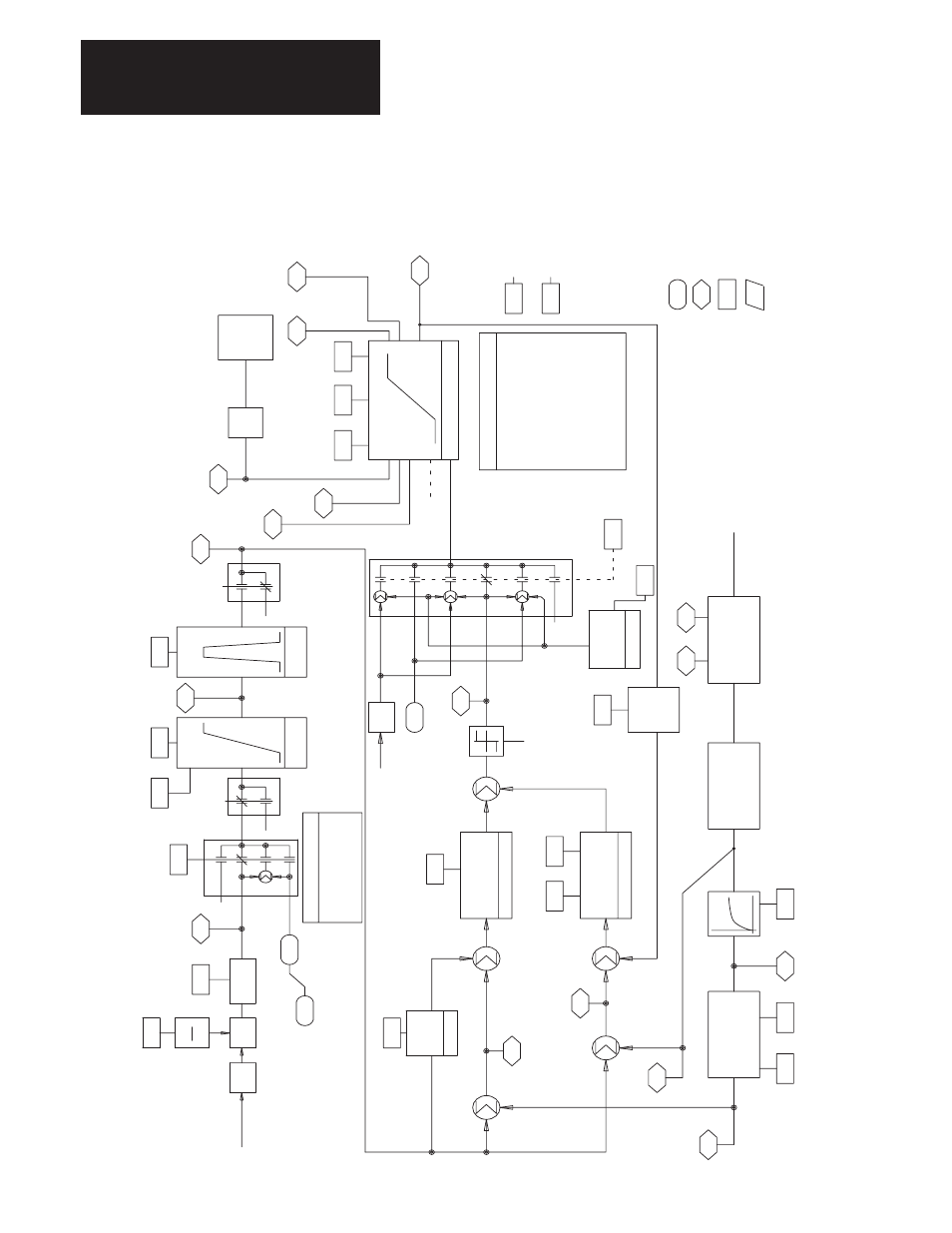
Figure E.1
1391-DES Software Block Diagram – Part 1
VEL
PI OUTPUT
35
186
FEEDBACK FIL
TER
INTG VEL
ERROR
185
LEAD/LAG
LEAD/LAG
VELOCITY
FEEDBACK
21
FIL
TERED VEL
20
–
–
+
PROP VEL
ERROR
33
FEEDBACK
22
A
VERAGE MTR
184
VEL
LOW P
ASS BW W
A
SCALING
169
VELOCITY FEEDBACK
4096 = BASE RPM (1000 RPM)
–
LPF
INTG GAIN
+
172
PROP GAIN
PRESET V
A
L
INTG
DROOP
+
171
DROOP
COMP
FRICTION
VEL
REF WHOLE
+/– 10V
A/D
+
FEED FWD
(10v = 8192)
FEED FWD GAIN
17
SUM
ANALOG VELOCITY
OFFSET
2
1
210
GAIN
+
–
168
PROP GAIN Kp
18
VEL
REF FRACT
+
1
+
2
+/– 9v
(3v = 4096)
EXT
. T
ORQUE
REF
.
+
34
44
A/D
0
bit
SELECT
57
COMMAND
ANALOG
VELOCITY
GAIN
21
1
ANALOG
VELOCITY
132
0
0
3
MODE
VEL
LOSE
ENABLE
CURRENT
(AMPS)
RA
TED MOT
OR
FEEDBACK
ACCUMULA
T
O
R
POSITION FEEDBACK
133
PRELOAD
CURRENT
4096 = 100%
RESOL
VER POSITION
RESOL
VER TURNS
23
24
PRELOAD
159
0
5
+
+
+
1
SELECT
T
ORQUE
155
SLOW
VOLA
TILE SLOW
P
ARAMETER
P
ARAMETER
(TEST
POINT)
FAST
SOURCE
FAST
SINK
CURRENT
LIMITER
RA
TE LIM
CURRENT
CUR LIM
4
+
+
+
0
3
+
+
2
0
bit
HOLD
NEGA
TIVE
48
POSITIVE
157
CUR LIM
156
CUR LIM
VELOCITY
COMMAND
ST
OP
19
IT
PROTECT
LIM.
BRIDGE
47
GAIN
A/D
MOT
OR CURRENT
4096 = RA
TED
Iq CURRENT
REF
.
45
158
10 BIT
MOT
OR
TYPE
154
51
LIMIT
CURRENT
49
FEEDBACK
CURRENT
50
CURRENT
FEEDBACK
SCALE
RA
TED
GAIN KN
VELOCITY
BW WN
FEEDBACK
GAIN Ki
INTG
PRE RAMP
VEL
25
145
VEL
LIMIT
CCW
RA
TE LIMIT
146
VEL
VEL
LIMIT
144
CW
LIMITER
VELOCITY
RAMP
ACC/DEC
170
O = VEL
MODE 1
(VELOCITY
REGULA
T
OR PI OUTPUT)
1 = VEL
MODE 2
(PI
OUTPUT
+ CURRENT
PRELOAD)
2 =
T
ORQUE
BLOCK
(EXTERNAL
T
ORQUE
REF
.)
3 = VEL
MODE 3
+ CURRENT
PRELOAD)
T
ORQUE SELECT
T
ABLE
4 =
A/D
TQ
BLK
(CURRENT
PRELOAD +
A/D)
0 =
A/D
INPUT
1 = DIGIT
AL
INPUT
2
=
A/D + DIGIT
AL
INPUT
3 = ZERO INPUT
VELOCITY MODE
TABLE
(PI OUTPUT
+
A/D
5 = ZERO VELOCITY
REF
.