Rockwell Automation 5720 DriveLogix System User Manual
Page 108
Publication 20D-UM002C-EN-P - November 2003
5-4 Configuring DriveLogix Motion
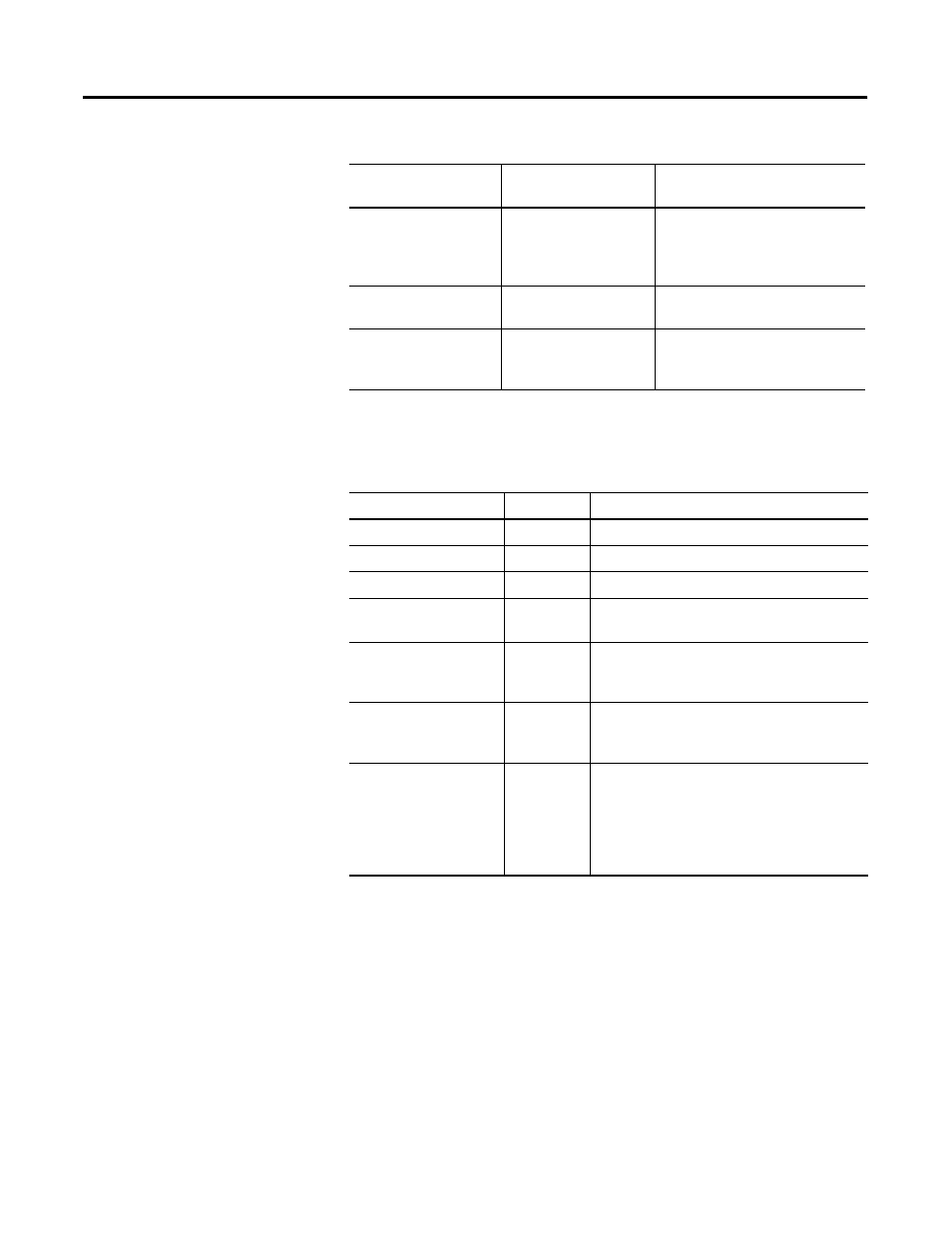
Next set up the parameters in the drive. Double click on the parameter to
change and set the values to those listed in Table 5.2.
1003 [Interp SyncInput]
919 [Motn Posit Sync]
The drive receives the
synchronization pulse from the
DriveLogix. This keeps the
interpolators in synch.
632 [Integer Out00]
155 [Logic Status]
The DriveLogix controller receives
the status of the drive.
22 [Speed Trim 2]
318 [Posit Spd Output]
This is a default link. The speed
loop receives the trim value from
the position regulator.
Table 5.2 Required Parameter Settings
Parameter
Value
Description
13 [Spd Ref2 Multi]
0.92
Sets the scale value for Speed Ref 2.
16 [Speed Ref Sel]
2
Selects Speed Ref 2 as the Speed Reference.
151 [Logic Command]
Bit 13 = 1
This enables the position loop within the drive.
664 [Lgx Comm Format]
19
This selects the format of the commands
coming to and from the DriveLogix processor.
740 [Position Control]
Bit 1 = 1
Bit 6 = 0
Bit 8 = 0
This sets up the position regulator to work with
the DriveLogix configuration.
742 [Posit Ref Sel]
0
This configures the drive position loop to
receive position commands from DriveLogix via
the Interpolator input.
1000 [SL Node Cnfg]
Bit 0 =1
This sets up the SynchLink as the time keeper.
This is used to synchronize the Drive and the
DriveLogix controller. This must be used when
the drive is a standalone system. If it is
connected to other SynchLink nodes, only one
needs this bit set.
Table 5.1 Required Parameter Links
Destination
Parameter
Source Parameter
Description