Appendix, Table of parameter numbers (pnu) – Lenze 931K User Manual
Page 67
Appendix
Table of parameter numbers (PNU)
l
67
KHB 13.0004−EN 2.1
Characteristics
Possible settings
Name
PNU
Description
Selection
Lenze
Name
PNU
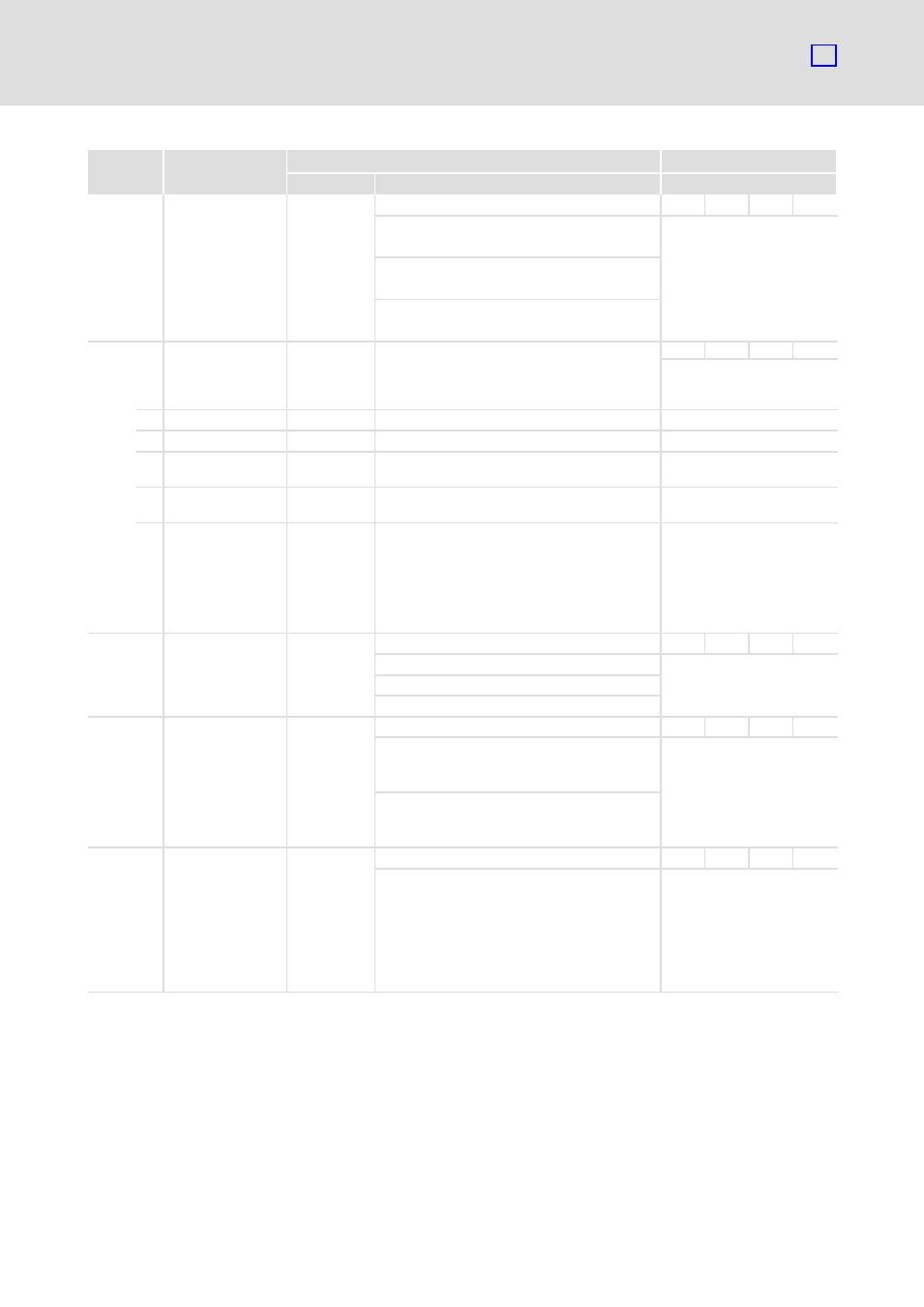
1000
0 Position Set
Number
68
Ċ
UINT16
RW
Ċ
0 ... 63
Standard position data sets
Position data sets of the
controller. The selected data
set can be parameterised via
PNU 1001.
For position data set 68,
additional settings can be
transferred via bits 4, 12 and
13 of control word 1.
64 ... 67
Reserved
68
PROFIBUS position data set
1001
Position Data
Ċ
INT32
RW
Ċ
Parameterisation of the
position data set selected via
PNU 1000.
0 Target Position
0
−32768
{1 inc}
32768 Target position
1 Profile Velocity
1000
0
{1 rpm}
3000 Travelling speed
3 Acceleration
Positioning
10000
0
{1 rpm/s}
20000 Acceleration
4 Deceleration
Positioning
10000
0
{1 rpm/s}
20000 Deceleration
5 All Accelerations
Positioning
10000
0
{1 rpm/s}
20000 Acceleration and
deceleration
l
Writes the set value to
PNU 1001.3 and
PNU 1001.4.
l
Reads out PNU 1001.3
only.
1002
0 Start Set Number
68
Ċ
UINT8
RW
Ċ
0 ... 63
Standard position data sets
When positioning is started
via control word 1, the
selected data set is activated.
64 ... 67
Reserved
68
PROFIBUS position data set
1003
0 Motion Profile Type
0
Ċ
UNIT16
RW
Ċ
0
Jerk−limited ramp is deactivated
The
acceleration/deceleration
time of the ramp cannot be
adjusted. When the ramp is
activated, the maximum
time (50 ms) is set
automatically.
2
Jerk−limited ramp is activated
1010
0 Target Velocity
0
0
{1 rpm}
6000
Ċ
INT32
RW
Ċ
Selection of the speed
setpoint.
l
If the speed control mode
is selected in SDC, the
selector under "setpoint
selection" changes over if
required: AIN0/1, Profibus
or RS232