Uning, Xplanations, Type – Red Lion PXU User Manual
Page 23: T-j, Curr 1-in opac, Op chys, Op tune, Hide 3-lc, Time proportional pid control, Linear pid control
23
23
TIME PROPORTIONAL PID CONTROL
In Time Proportional applications, the output power is converted into output
On time using the Cycle Time. For example, with a four second cycle time and
75% power, the output will be on for three seconds (4 × 0.75) and off for
one second.
The cycle time should be no greater than 1/10 of the natural period of
oscillation for the process. The natural period is the time it takes for one
complete oscillation when the process is in a continuously oscillating state.
LINEAR PID CONTROL
In Linear PID Control applications, OP1 provides a linear output signal that
is proportional to the calculated OP1 value (% Output Power). The PXU allows
the user to program the analog low and high output signal that will correspond
to 0% and 100% output power. The Analog Output will then be proportional to
the PID calculated % output power. For example, with 0 to 10 VDC scaled 0 to
100% an OP1 value of 75% provides an analog output of 7.5 VDC.
AUTOMATIC CONTROL MODE
In Automatic Control Mode, the percentage of output power is automatically
determined by PID or On/Off calculations based on the setpoint and process
feedback. For this reason, PID Control and On/Off Control always imply
Automatic Control Mode.
MANUAL CONTROL MODE
In
USEr
Control Mode, the controller operates as an open loop system, and
does not use the setpoint or process feedback. The user adjusts the percentage
of power through the OP1 or OP2 parameter to control the power for each
Output. The Low and High Output Power limits are ignored when the controller
is in Manual.
MODE TRANSFER
When transferring the controller mode between Automatic and User/Manual,
the controlling outputs remain constant, exercising true “bumpless” transfer.
When transferring from Manual to Automatic, the power initially remains
steady, but Integral Action corrects (if necessary) the closed loop power demand
at a rate proportional to the Integral Time.
p
id
T
uning
e
xplanaTiOns
AUTO-TUNE
Auto-Tune is a user-initiated function that allows the controller to
automatically determine the Proportional Band, Integral Time, Derivative Time,
Integration Default, and Relative Gain (Heat/Cool) values based upon the
process characteristics. The Auto-Tune operation cycles the controlling
output(s) at the setpoint. The nature of these oscillations determines the settings
for the controller’s parameters.
Prior to initiating Auto-Tune, it is important that the controller and system be
first tested. This can be accomplished in On/Off Control or Manual Control
Mode. If there is a wiring, system or controller problem, Auto-Tune may give
incorrect tuning or may never finish. Auto-Tune may be initiated at start-up,
from setpoint or at any other process point. However, ensure normal process
conditions (example: minimize unusual external load disturbances) as they will
have an effect on the PID calculations.
Start Auto-Tune
Below are the parameters and factory settings that affect Auto-Tune. If these
setting are acceptable then Auto-Tune can be started just by performing three
steps. If changes are needed, then they must be made before starting Auto-Tune.
DISPLAY
PARAMETER
FACTORY
SETTING
MODULE
tYpE
Input Type
t-j
Curr
1-IN
OPAC
Output Control Action
2-OP
CHYS
On/Off Control Hysteresis
2°
(temp)
20
(temp)
2-OP
tUNE
Auto-Tune Access
HIdE
3-LC
1. Enter the Setpoint value in the Display Loop.
2. Set the On/Off Control Hysteresis (
CHYS
) to a value that is appropriate for the
process.
3. Initiate Auto-Tune by changing to in the Hidden Loop, and then
press :.
Auto-Tune Progress
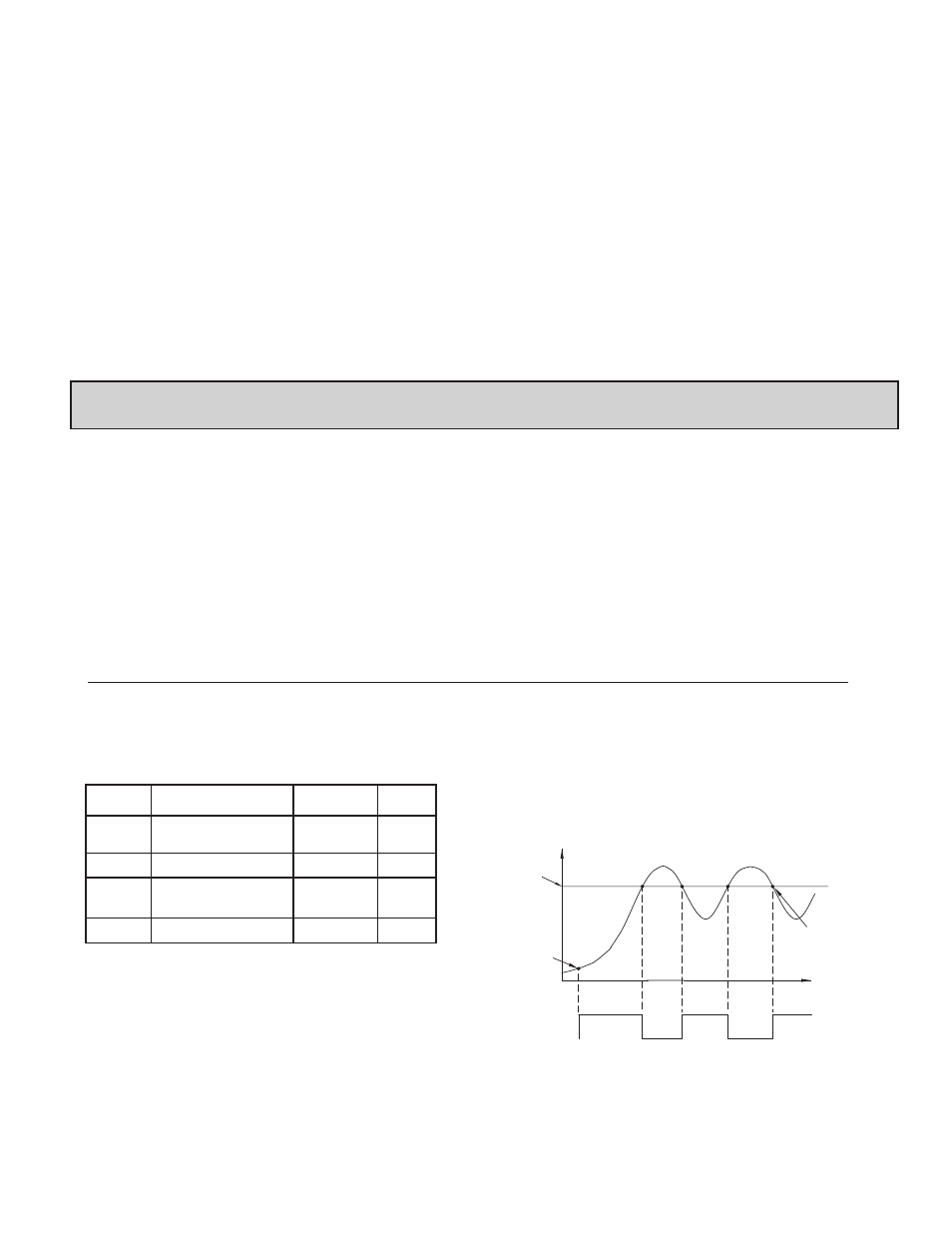
The controller will oscillate the controlling output(s) for four cycles. The
AT
annunciator will flash during this time. Parameter viewing is permitted during
Auto-Tune. The time to complete the Auto-Tune cycles is process dependent.
The controller should automatically stop Auto-Tune and store the calculated
values when the four cycles are complete. If the controller remains in Auto-Tune
unusually long, there may be a process problem. Auto-Tune may be stopped by
entering in .
TIME
INPUT
Aut1
Aut4
AUTO-TUNE
START
SETPOINT
AUTO-TUNE COMPLETE, PID
SETTINGS ARE CALCULATED
AND LOADED INTO MEMORY
Aut2
Aut3
ON
OFF
ON
OFF
OUTPUT (r) :
PHASE
AUTO-TUNE OPERATION
(REVERSE ACTING)