1 module 1 - i, Type dcpt scal fltr band shft dsp1, Dsp2 – Red Lion PXU User Manual
Page 12: Splo, Inp cnfp sphi, Usr1 usr2, F1in, F2in, Nput, Arameters
12
12
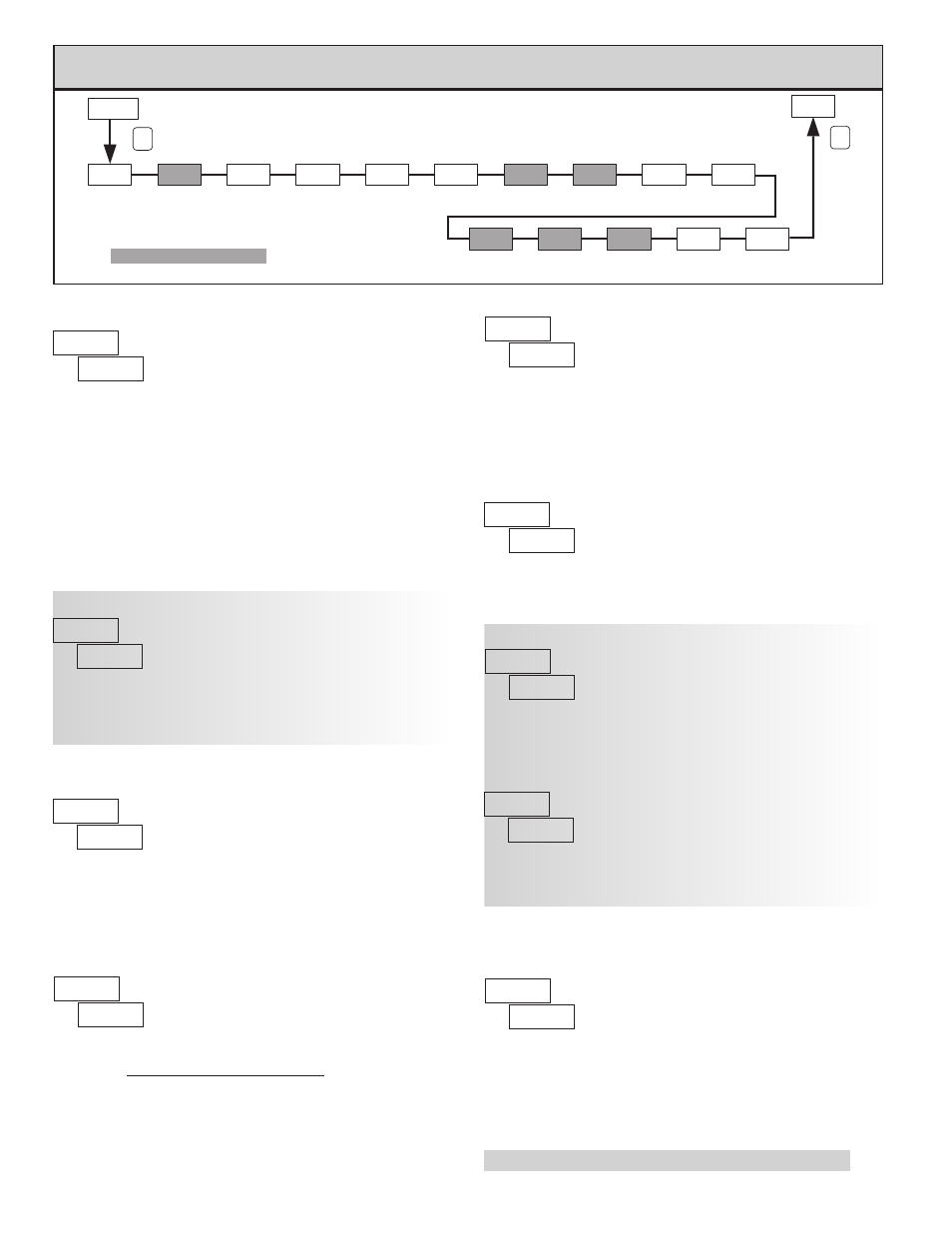
7.1 mOdule 1 - i
npuT
p
arameTers
(
1-IN
)
tYPE
dCPt
SCAL
FLtr
bANd
SHFt
dSP1
INPUT
TYPE
TEMP
SCALE
DECIMAL
RESOLUTION
DIGITAL
FILTERING
BAND
FILTER
VALUE 1
DISPLAY
SHIFT/
OFFSET
dSP2
VALUE 2
DISPLAY
SPLO
SETPOINT
LOW LIMIT
1-INP
CNFP
SPHI
SETPOINT
HIGH LIMIT
P
P
USr1
USr2
INPUT 1
USER
USER
INPUT 2
F1In
FUNCTION
F1 KEY
F2In
F2 KEY
FUNCTION
CJC
COLD
JUNCTION
Programming/model dependent.
PARAMETER MENU
INPUT TYPE
TEMPERATURE SCALE
Fahrenheit
C
Celsius
Select the input type that corresponds to the input sensor.
Select either degrees Fahrenheit or Celsius. If changed, check related
parameter values.
* Temperature Input only.
DECIMAL RESOLUTION
to
.
for temperature inputs
to
.
for process inputs
Select whole degrees, or tenths of degrees for Temperature display, Setpoint
values, and related parameters. For thermocouple types R, S, and B, only whole
degrees of resolution is available. For process inputs up to three decimal point
resolution is available.
INPUT FILTER BAND
to
display units
The filter will adapt to variations in the input signal. When the variation
exceeds the input filter band value, the digital filter disengages and a noise
discrimination filter engages that rejects noise bursts. When the variation
becomes less than the band value, the digital filter engages again. The value of
the band is in display units.
SETPOINT LOW LIMIT
to
input range dependent
The controller has a programmable low setpoint limit value to restrict the
range of the setpoint. Set the limit so that the setpoint value cannot be set below
the safe operating area of the process.
DIGITAL FILTERING
= least to
= most
The filter is an adaptive digital filter that discriminates between measurement
noise and actual process changes. The equation for digital filtering is:
PV =
Where:
n = Digital Filtering selection
If the signal is varying greatly due to measurement noise, increase the filter
value. Decrease the filter value for quicker controller response.
Last displayed PV
[
n + measured value
n + 1
DISPLAY VALUE SCALING POINT 1
to
Enter the first coordinate zero Display Value associated with the lower range
(0V/mA, 4mA) of the input signal, by using the arrow keys.
DISPLAY VALUE SCALING POINT 2
to
Enter the second coordinate full scale Display Value associated with the
upper range (5V, 10V, etc) of the input signal, by using the arrow keys.
* Process input only.
SELECTION
TYPE
SELECTION
TYPE
t-K
K TC
ttK
TXK TC
t-J
J TC
r32
RTD 392
t-t
T TC
r35
RTD 385
t-E
E TC
nI
RTD 672
t-N
N TC
U
Cu 50
t-r
R TC
Su
0-5 Volt
t-S
S TC
10u
0-10 Volt
t-b
B TC
0-20
0-20 mA
t-L
L TC
4-20
4-20 mA
t-U
U TC
0.05u
0-50 mV
SHIFT/OFFSET
to
display units
This value offsets the controller’s display value by the entered amount. This
is useful in applications in which the sensor does not provide an accurate signal.
C
C
8
b
48
Shaded parameters are programming/model dependent.