Mechanical mounting, Pitch and roll conventions, 3 mechanical mounting – PNI TCM User Manual
Page 15
PNI Sensor Corporation
DOC#1014688 r06
TCM User Manual
– July 2013
Page 10
Determine if the magnetic field is within the dynamic range of the compass.
With the compass mounted, rotate and tilt the system in as many positions as
possible. While doing so, monitor the magnetometer outputs, observing if the
maximum linear range is exceeded.
4.3
Mechanical Mounting
The TCM is factory calibrated with respect to its mounting holes. It must be aligned within
the host system with respect to these mounting holes. Ensure any stand-offs or screws used
to mount the module are non-magnetic. Refer to Section 3.2 for dimensions, hole locations,
and the reference frame orientation.
Note: Ensure that when attaching the TCM to the host system, the mounting method does not
introduce stresses on the board, as this can affect the performance of the accelerometer, and
therefore also negatively affect heading accuracy.
4.3.1
Pitch and Roll Conventions
The TCM uses a MEMS accelerometer to measure the tilt angle of the compass. This
data is output as pitch and roll data, and is also used in conjunction with the
magnetometers to provide a tilt-compensated heading reading.
The TCM utilizes Euler angles as the method for determining accurate orientation. This
method is the same used in aircraft orientation where the outputs are heading (also called
yaw or azimuth), pitch and roll. When using Euler angles, roll is defined as the angle
rotated around an axis through the center of the fuselage while pitch is rotation around an
axis through the center of the wings. These two rotations are independent of each other
since the rotation axes rotate with the plane body.
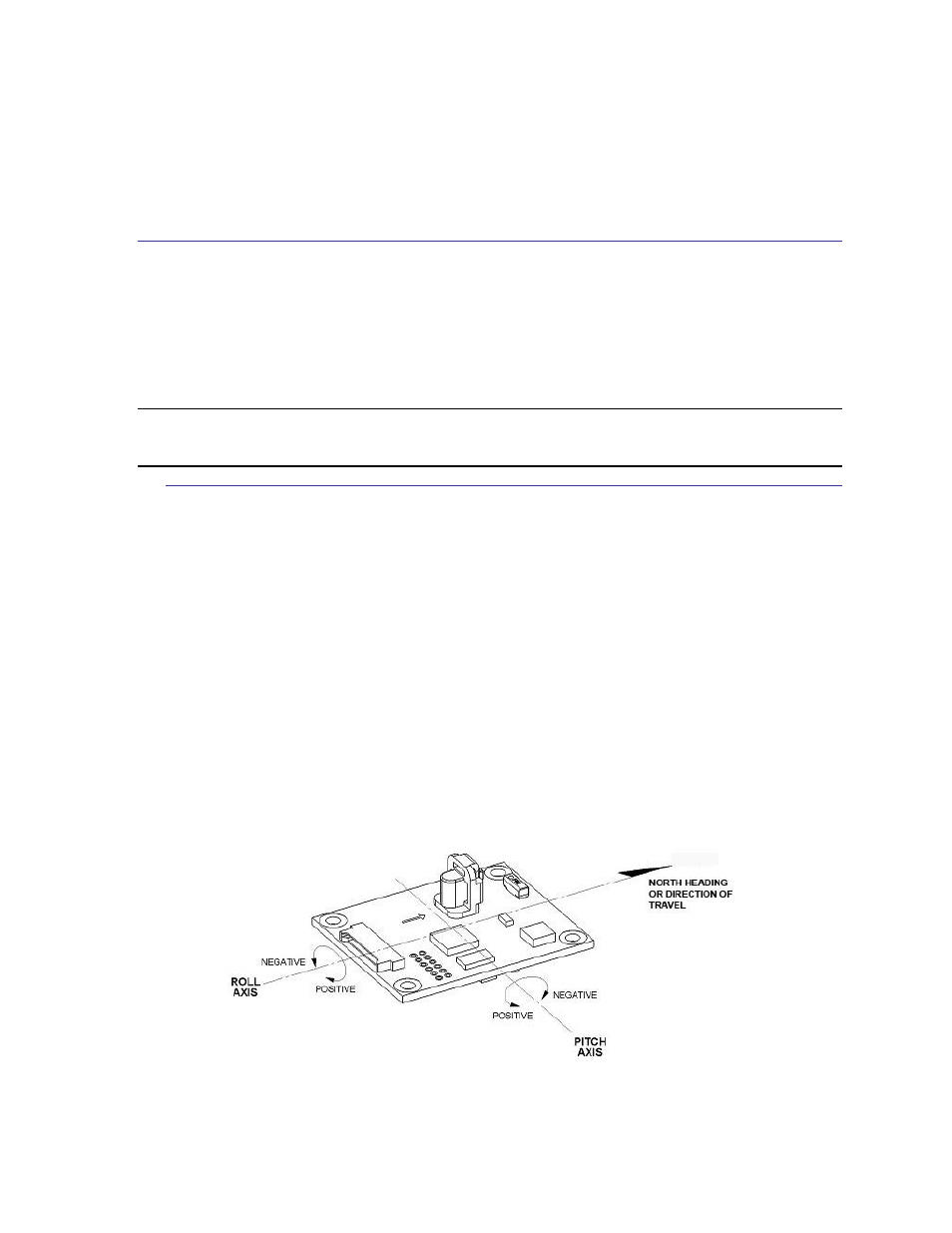
As shown in Figure 4-1, for the TCM a positive pitch is when the front edge of the board
is rotated upward and a positive roll is when the right edge of the board is rotated down.
Figure 4-1: Positive & Negative Roll and Pitch Definition