Rainbow Electronics MAX17480 User Manual
Page 26
MAX17480
AMD 2-/3-Output Mobile Serial
VID Controller
26
______________________________________________________________________________________
Transient Phase Repeat
When a transient occurs, the output voltage deviation
depends on the controller’s ability to quickly detect the
transient and slew the inductor current. A fixed-frequency
controller typically responds only when a clock edge
occurs, resulting in a delayed transient response. To
minimize this delay time, the MAX17480 includes
enhanced transient detection and transient phase
repeat capabilities. If the controller detects that the out-
put voltage has dropped by 41mV, the transient detec-
tion comparator immediately retriggers the phase that
completed its on-time last. The controller triggers the
subsequent phases as normal, on the appropriate
oscillator edges. This effectively triggers a phase a full
cycle early, increasing the total inductor-current slew
rate and providing an immediate transient response.
Core SMPS Feedback
Adjustment Amplifiers
The MAX17480 provides an FBAC and FBDC pin for
each SMPS to allow for flexible AC and DC droop set-
tings. FBAC is the output of an internal transconduc-
tance amplifier that outputs a current proportional to the
current-sense signal. FBDC is the feedback input that is
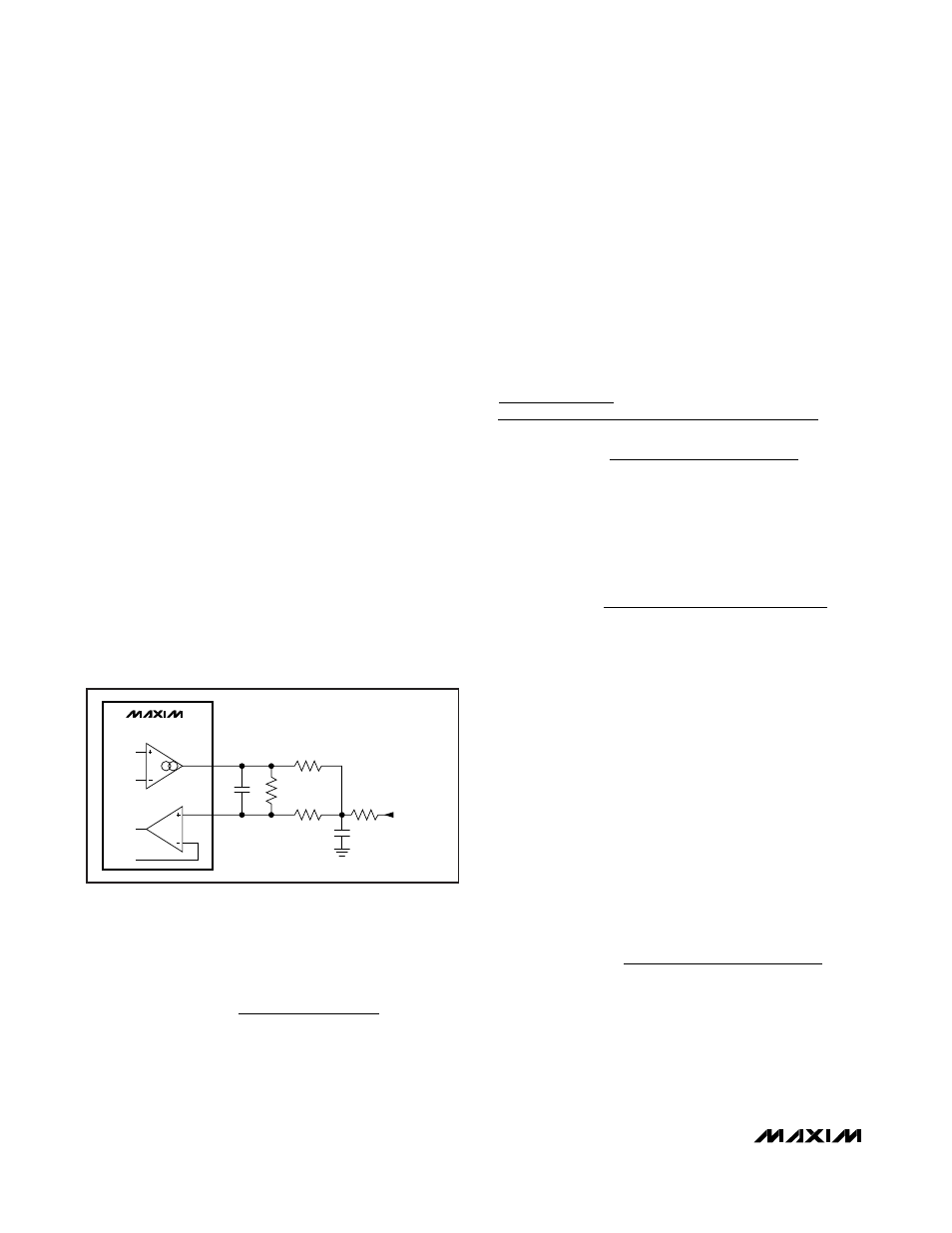
compared against the internal target. Place resistors
and capacitors at the FBAC and FBDC pins as shown
in Figure 5. With this configuration, the DC droop is
always less than or equal to the AC droop.
Core Steady-State Voltage Positioning (DC Droop)
FBDC is the feedback input to the error amplifier.
Based on the configuration in Figure 5, the core SMPS
output voltage is given by:
where the target voltage (V
TARGET
) is defined in the
Nominal Output-Voltage Selection
section, and the
FBAC amplifier’s output current (I
FBAC
) is determined
by each phase’s current-sense voltage:
where V
CS
= V
CSP
- V
CSN
is the differential current-sense
voltage, and G
m(FBAC)
is typically 2mS as defined in the
Electrical Characteristics
table. DC droop is typically used
together with the +12.5mV offset feature to keep within the
DC tolerance window of the application. See the
Offset
and Address Change for Core SMPSs (OPTION)
section.
The ripple voltage on FBDC must be less than the -33mV
(max) transient phase repeat threshold:
where
∆I
L
is the inductor ripple current, R
ESR
is the
effective output ESR at the remote sense point, R
SENSE
is the current-sense element, and G
m(FBAC)
is 2.06mS
(max) as defined in the
Electrical Characteristics
table.
The worst-case inductor ripple occurs at the maximum
input-voltage and maximum output-voltage conditions:
To make the DC and AC load-lines the same, directly
short FBAC to FBDC.
To disable DC voltage positioning, remove R
FB
, which
connects FBAC to FBDC.
Core Transient Voltage-Positioning Amplifier
(AC Droop)
Each of the MAX17480 core supply SMPSs includes one
transconductance amplifier for voltage positioning. The
amplifiers’ inputs are generated by summing their respec-
tive current-sense inputs, which differentially sense the
voltage across either current-sense resistor or the induc-
tor’s DCR.
The voltage-positioning droop amplifier’s output (FBAC)
connects to the remote-sense point of the output
through an RC network that sets each phase’s AC volt-
age-positioning gain:
where the target voltage (V
TARGET
) is defined in the
Nominal Output-Voltage Selection
section, Z
CFB
is the
effective impedance of C
FB
, and the FBAC amplifier’s
output current (I
FBAC
) is determined by each phase’s
current-sense voltage:
V
V
R
R
R
R
R
Z
OUT
TARGET
FBAC
FBDC
FBAC
FBDC
FB
CF
=
−
×
+
+
B
B
FBDC
I
∆I
V
V
V
V
L MAX
OUT MAX
IN MAX
OUT MAX
IN M
(
)
(
)
(
)
(
)
(
=
−
(
)
A
AX SW
f
L
)
∆
R
mV
I R
R
R
FBDC
L ESR
FBAC
F
66
≤
−
(
)
+
(
B
B
FBAC
L SENSE m FBAC
R
I R
G
mV
)
(
)
∆
− 66
R
R
R
R
I R
G
R
FBAC
FBAC
FBDC
FB
L SENSE m FBAC
FBDC
+
+
+
∆
(
)
∆∆I R
mV
L ESR
2
33
≤
I
G
V
FBAC
m FBAC
CS
=
(
)
V
V
R
R
R
R
R
I
OUT
TARGET
FBDC
FBAC
FBAC
FBDC
FB
FB
=
−
Ч
+
+
Ч
A
AC
R
FBAC
R
FBDC
FBAC
CSP
CSN
G
m(FBAC)
ERROR
AMP
FBDC
C
FB
4700pF
CORE SENSE_H
AGND
100
Ω
TARGET
R
FB
MAX17480
Figure 5. Core SMPS Feedback Connection