3 specifications – Adept s1300 Viper User Manual
Page 58
Chapter 6 - Technical Specifications
58
Adept Viper s1300 Robot User’s Guide, Rev B
6.3
Specifications
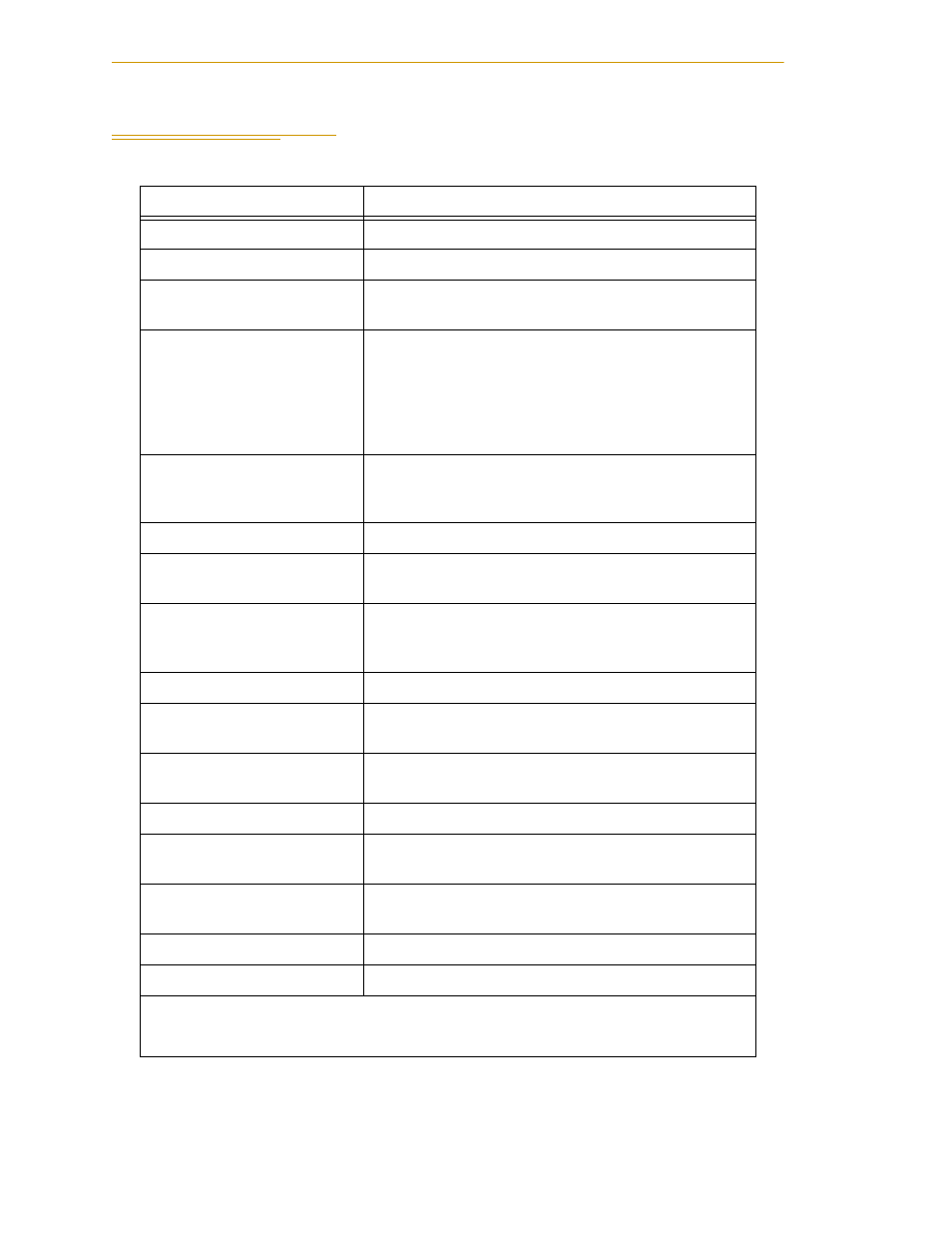
Table 6-1. Robot Specifications
Specification
s1300
Overall arm length
520 (first arm) + 590 (second arm) = 1100 mm
Arm offset
J1 (swing): 180 mm, J3 (front arm): 100 mm
Maximum motion area
R = 1388 mm (end-effector mounting face)
R = 1298 mm (Point P: J4, J5, J6 center)
Motion range
J1: ±170°
J2: -180°, +45°
J3: +10°, +255°
J4: ±185°
J5: ±120°
J6: ±360°
Maximum composite speed
(at the center of an
end-effector mounting face)
8300 mm/s
Maximum payload
10 kg
Position repeatability (Note 1)
In each of X, Y and Z directions: ±0.07 mm
(at the center of an end-effector mounting face)
Maximum allowable inertia
moment
Around J4: 0.36 kgm
2
Around J5: 0.36 kgm
2
Around J6: 0.064 kgm
2
Position detection
Absolute encoder
Drive motor and brake
AC servomotors for all joints
Brakes for joints J2 to J6
User air piping (Note 2)
7 systems (
Ø
4x6,
Ø
6x1), 3 solenoid valves (2-position,
double solenoid) contained.
User signal line
10 (for proximity sensor signals, etc.)
Air source - Operating
pressure
1.0 × 10
5
Pa to 3.9 × 10
5
Pa
Air source - Maximum
allowable pressure
4.9 × 10
5
Pa
Degree of Protection
IP-40
Weight
Approx. 78 kg
Note 1: Position repeatability is the value at constant ambient temperature.
Note 2: Only the
Ø
4x6 air piping system may be controlled by built-in solenoid valves.