Transport procedure – Adept s1300 Viper User Manual
Page 20
Chapter 2 - Robot Installation
20
Adept Viper s1300 Robot User’s Guide, Rev B
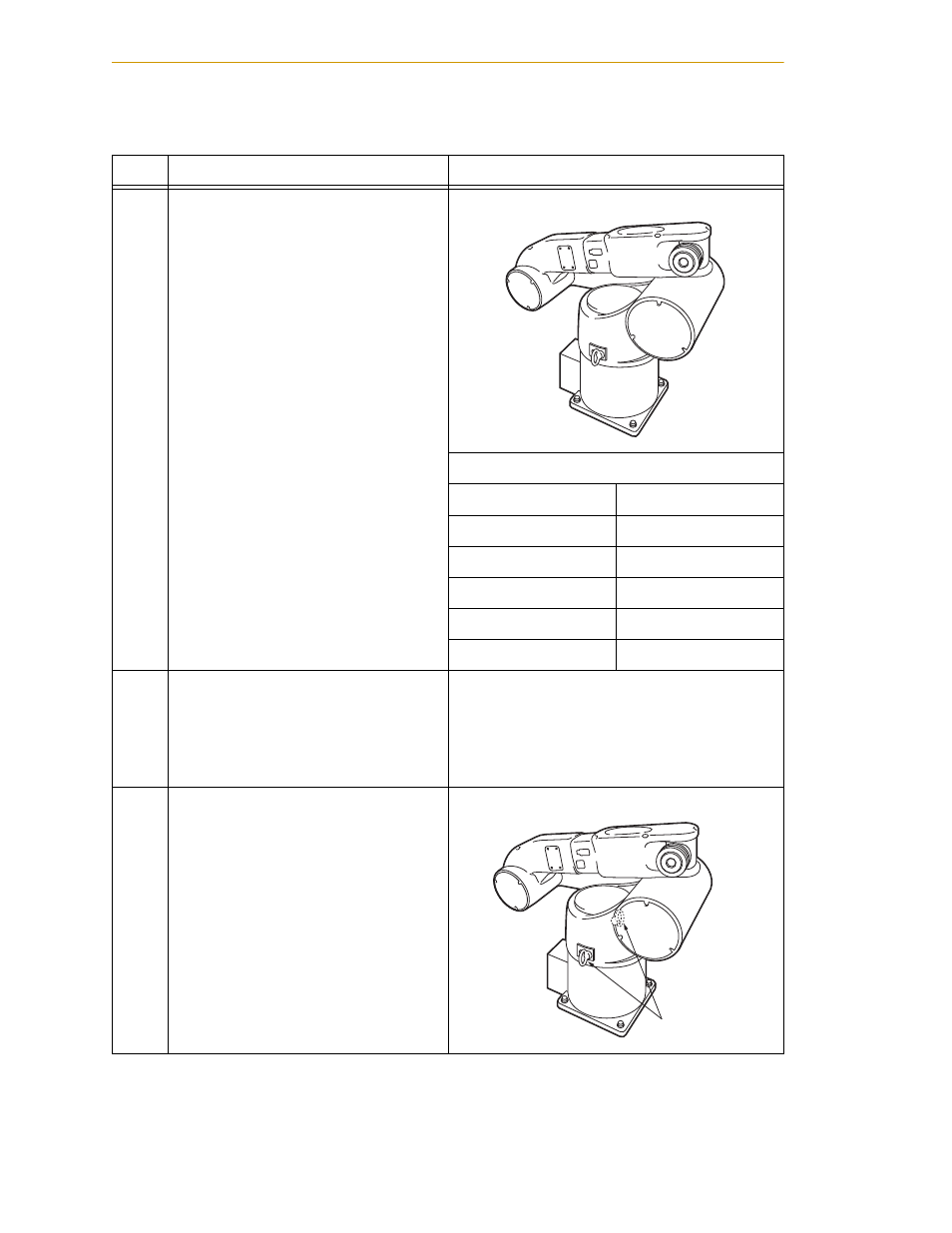
Transport Procedure
Step
Procedure
Drawing
1
Before transportation, set the robot in
a transport position as shown at right
by manually moving the second, third
and fourth axes.
When unpacked first, the robot is in
the transport position, so this job is
not required.
Transport Position
Axis Angle
First axis (J1)
+90°
Second axis (J2)
-175°
Third axis (J3)
+255°
Fourth axis (J4)
-90°
Fifth axis (J5)
-90°
2
Disconnect the robot control cable, air
piping and user signal cables from the
robot unit.
When the robot unit is first unpacked,
this job is not required.
3
As shown at right, mount the
eyebolts.
When delivered, the robot unit is
packed with eyebolts attached, so this
job is not required
Eyebolts