Adept s1300 Viper User Manual
Page 21
Transporting the Robot
Adept Viper s1300 Robot User’s Guide, Rev B
21
4
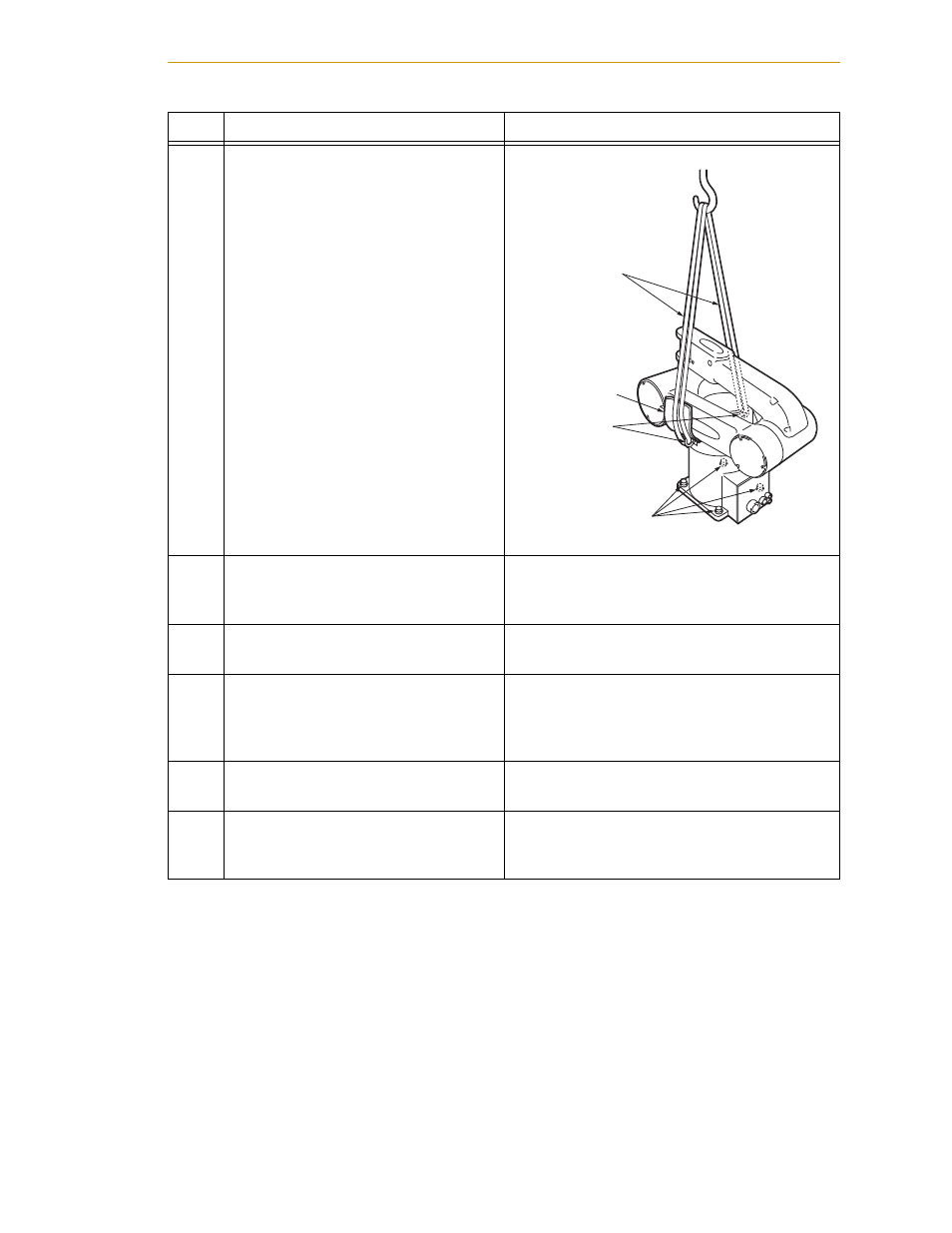
As shown at right, place a waste cloth
on the second arm and pass the wire
through the two eyebolts.
Note
: Before transporting the robot,
check that the path to the target
position is free of obstacles.
5
Worker A: Remove the four bolts
while supporting the robot unit to
prevent it from getting overturned.
6
Worker B: Operate the crane and
move the robot unit to the target site.
7
Worker B: Put the robot unit down in
the target position.
Worker A: Temporarily secure the
robot unit with four bolts.
8
Secure the robot unit according to the
instructions in
9
Remove the eyebolts from the robot
unit.
Caution:
Before running the robot unit, be
sure to remove the eyebolts. Otherwise, the
robot arm will strike against those eyebolts.
Step
Procedure
Drawing
Waste Cloth
Robot Mounting
Bolts
Wire
(Belt sling)
Eyebolts