IAI America RCM-E User Manual
Page 33
25
(11) Cmnd Mode:
- This field is invalid.
The factory setting is 0.
(12) Stop Mode:
- It defines the power saving method on standby after completion of positioning to the
target position set in the “Position” field of the position number.
0: Invalid power saving method * The default setting is 0 (invalid).
1: Auto servo OFF method. Delay time defined with the parameter No. 36
2: Auto servo OFF method. Delay time defined with the parameter No. 37
3: Auto servo OFF method. Delay time defined with the parameter No. 38
4: Full servo control method
Full servo control method
The holding current can be reduced by servo-controlling the pulse motor.
The degree of reduction varies depending on the actuator model, load condition, etc., but the
holding current decreases approximately by a factor of 2 to 4.
No displacement occurs since this method maintains the servo ON status.
The actual holding current can be checked on the monitoring screen of PC-compatible
software.
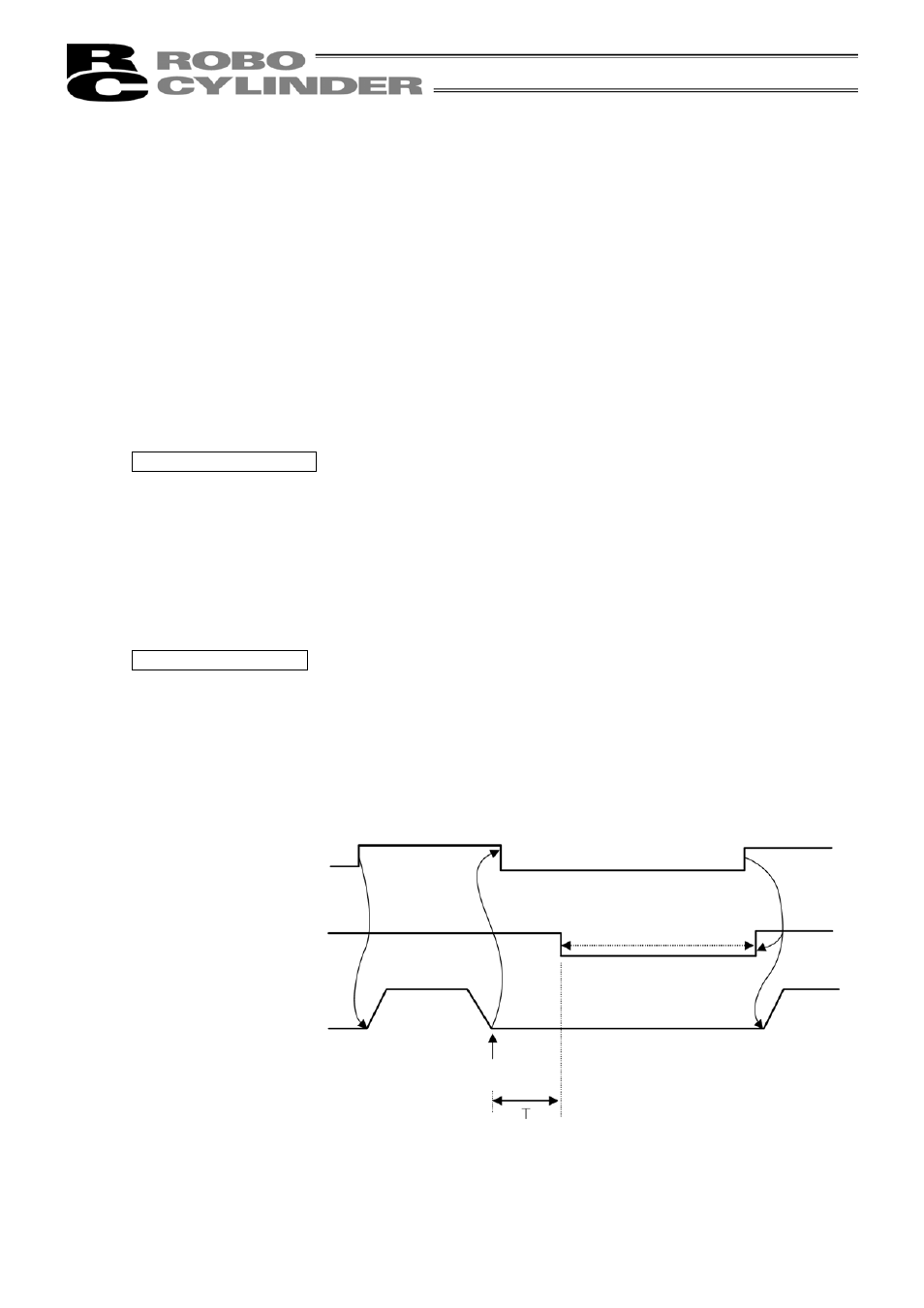
Auto servo OFF method
When a given length of time has elapsed after completion of positioning, the servo OFF status
is automatically entered.
(Since the holding current does not flow, the power consumption can be saved by the same
amount.)
When a movement command is subsequently given from PLC, the status returns to the servo
ON and the actuator starts to move.
Movement
command
Servo status
Actuator
movement
Servo ON status
Auto servo OFF
(Green LED flashing)
Target position
T: Delay time (sec) until the servo
OFF status is entered after
completion of positioning
It is set with the parameter.