Dlr object 71 (class 0x47) – Yaskawa V1000 Option Dual Port EtherNet/IP SI-EN3D/V Technical Manual User Manual
Page 47
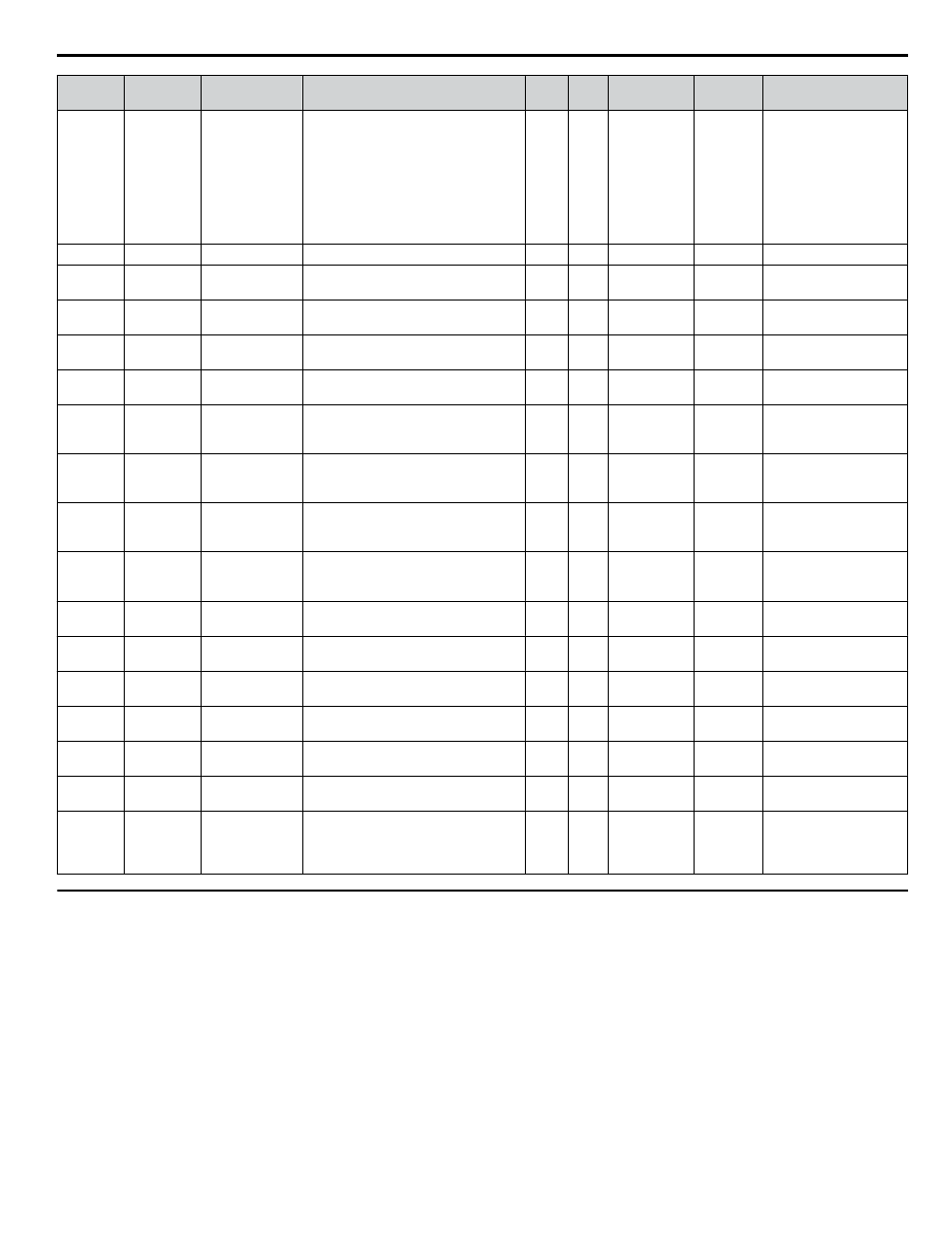
Instance
ID
Attribute
Name
Description
Get
Set
Size
Range
Default
1
9
Current Actual
Actual Output Current.
Display is in the following units:
BA0001 to BA0018, 2A0001 to
2A0040, 4A0001 to 4A0023: 0.01 A
units.
2A0056 to 2A0069, 4A0031 to
4A0038: 0.1 A units.
Unit is not affected by Current Scale
(CS).
O
–
Word
–
0
1
11
Torque Actual Not supported
O
–
Word
–
0
1
12
Torque
Reference
Not supported
O
–
Word
–
0
1
15
Power Actual
(W)
Drive Output Power Unit is affected by
Power Scale (PS).
O
–
Word
–
0
1
16
Input Voltage
(V)
Drive Input Voltage
Unit is affected by Voltage Scale (VS).
O
–
Word
–
Dep. on capacity
1
17
Output Voltage
(V)
Drive Output Voltage
Unit is affected by Voltage Scale (VS).
O
–
Word
–
0
1
18
Accel Time (ms)
Acceleration Time 1 (C1-01)
Units set in parameter C1-10.
Unit is affected by Time Scale (TS).
O
O
Word
–
2710H
1
19
Decel Time (ms)
Acceleration Time 1 (C1-02)
Units set in parameter C1-10.
Unit is affected by Time Scale (TS).
O
O
Word
–
2710H
1
20
Low Speed
Limit Percent of
Max Speed
Frequency Reference Lower Limit
(d2-02)
O
O
Word
0 to 1100
0
1
21
High Speed
Limit Percent of
Max Speed
Frequency Reference Upper Limit
(d2-01)
O
O
Word
0 to 1100
3E8H
1
22
Speed Scale
(-15 to 15)
Setting for F7-17, scale of units for
speed related data.
O
O
Byte
-15 to 15
0
1
23
Current Scale
(-15 to 15)
Setting for F7-18, scale of units for
current related data.
O
O
Byte
-15 to 15
0
1
24
Torque Scale
(-15 to 15)
Setting for F7-19, scale of units for
torque related data.
O
O
Byte
-15 to 15
0
1
26
Power Scale
(-15 to 15)
Setting for F7-20, scale of units for
power related data.
O
O
Byte
-15 to 15
0
1
27
Voltage Scale
(-15 to 15)
Setting for F7-21, scale of units for
voltage related data.
O
O
Byte
-15 to 15
0
1
28
Time Scale
(-15 to 15)
Setting for F7-22, scale of units for
speed related data.
O
O
Byte
-15 to 15
0
1
29
Reference from
Net (Status)
Status of Reference Command
(1 = Network).
0: As set by the drive parameters
1: Network
O
–
Byte
–
0
u
DLR Object 71 (Class 0x47)
Device Level Ring (DLR) is a layer 2 protocol allowing for redundancy in EtherNet/IP based ring topology networks. DLR
allows devices to be placed in a ring to reduce the need for switch hardware and cabling and allow for the detection and
recovery of faults in the ring. This option is a beacon based ring node implementation.
To set up a DLR network, configure a supervisor on the network prior to connecting and powering on all devices in the ring.
Establishing a ring without an active supervisor may cause a loss of communication to devices on the ring.
The supervisor precedence must be configured when setting up the supervisor. Typically, the default beacon rate is 400 ms to
allow for faster fault detection and recovery period and should be fast enough for devices to recover on the ring without losing
an I/O connection. The precedence value for the supervisor is used when more than one supervisor is present. When two
supervisors are on the network, the supervisor with the higher MAC address will become the supervisor and the other will
become a backup supervisor.
Yaskawa recommends that all devices in the ring be DLR capable. Add non-DLR devices to the ring through a DLR-capable
device, such as a 3-port ETAP.
10 General Class Objects
YASKAWA SIEP YAICOM 15A V1000 Option Dual-Port EtherNet/IP SI-EN3D/V Technical Manual
47