Speed and torque control input - 72 (0x48) – Yaskawa SI-EN3D User Manual
Page 30
Name
Description
Drive State
Contains the value from the Control Supervisor (Class 0x29) Instance 1 Attribute 6.
Speed Actual
Actual Drive Speed
Monitors drive output frequency.
Speed actual data: Output frequency x 2
SS
(SS: Speed scale)
Setting range: 0 to 0xFFFF
For example, when output frequency of 1024 with a speed scale of 2:
Speed actual data = 1024 x 2
2
= 4096 = 0x1000
Unit depends on o1-03.
u
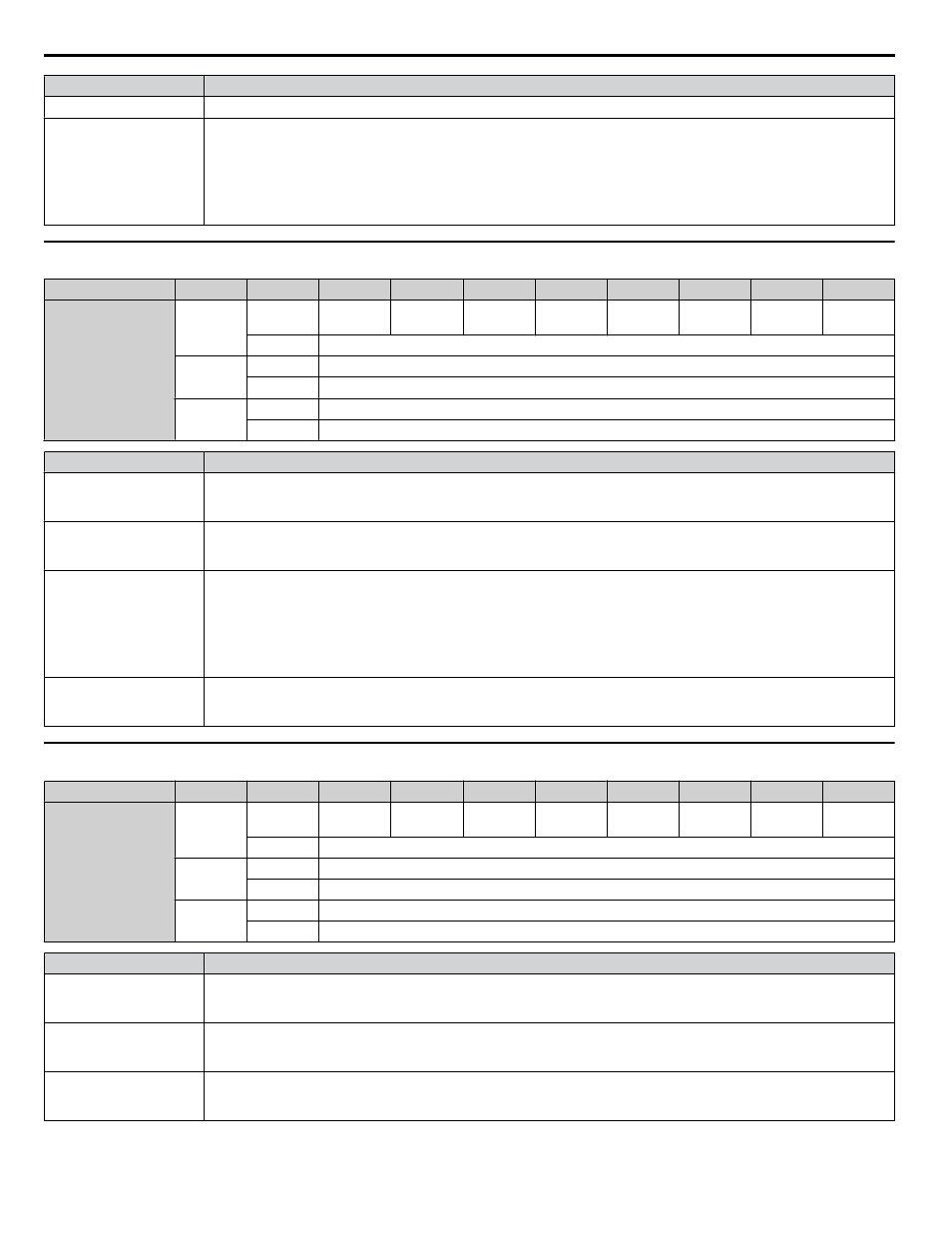
Speed and Torque Control Input - 72 (0x48)
Input Instance
Word
Byte
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
72
0
0
–
–
–
–
–
Running 1
(FWD)
–
Faulted
1
–
1
2
Speed Actual (Low Byte)
3
Speed Actual (High Byte)
2
4
Torque Actual (Low Byte)
5
Torque Actual (High Byte)
Name
Description
Faulted
Faulted
0: No Faults Occurred
1: Fault Occurred
Running 1 (FWD)
Forward Running
0: Stop or Reverse Running
1: Forward Running
Speed Actual
Actual Drive Speed
Monitors drive output frequency.
Speed actual data: Output frequency x 2
SS
(SS: Speed scale)
Setting range: 0 to 0xFFFF
For example, when output frequency of 1024 with a speed scale of 2:
Speed actual data = 1024 x 2
2
= 4096 = 0x1000
Unit depends on o1-03.
Torque Actual
Output Torque
Shows the Torque Reference.
Value displays in 0.1% units.
u
Extended Speed and Torque Control Input - 73 (0x49)
Input Instance
Word
Byte
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
73
0
0
At Speed
Ref from
Net
Ctrl from
Net
Ready
Running 2
(REV)
Running 1
(FWD)
Warning
Faulted
1
Drive State
1
2
Speed Actual (Low Byte)
3
Speed Actual (High Byte)
2
4
Torque Actual (Low Byte)
5
Torque Actual (High Byte)
Name
Description
Faulted
Faulted
0: No Faults Occurred
1: Fault Occurred
Warning
Warning
0: No Warning Occurred
1: Warning Occurred
Running 1 (FWD)
Forward Running
0: Stop or Reverse Running
1: Forward Running
9 Input Assemblies (Drive Produces)
30
YASKAWA SIEP YAICOM 16A 1000-Series Option Dual-Port EtherNet/IP SI-EN3D Technical Manual