Filter settings for distance measuring sensors – Microsonic LCA-2 User Manual
Page 27
Changing parameters on distance measuring sensors
Page 27 of 51
F
ILTER SETTINGS FOR DISTANCE MEASURING SENSORS
microsonic brand ultrasonic sensors normally combine several ultrasonic measurements for a reliable
result. Plausibility is checked and measured values are attenuated. All filter settings may be applied to
switching sensors as well as to analogue sensors. Different filter methods are at hand to achieve this,
where the intensity of the influence can be varied.
All internal filters always lead to a reduction of the switching frequencies or an increase of the
settling time of analogue signals. If a very quick response of the sensor is necessary, all filters can be
deployed. How-ever you have to take into account that the sensor looses any kind of noise suppression.
A
LL
S
ENSOR FAMILIES EXCEPTING MIC
-.../M30,
LCS
,
LPC AND UCS
Within these sensor families you are able to select four different types of filter. On every of these filter
types, you can set the filter strength in steps from 0 to 9.
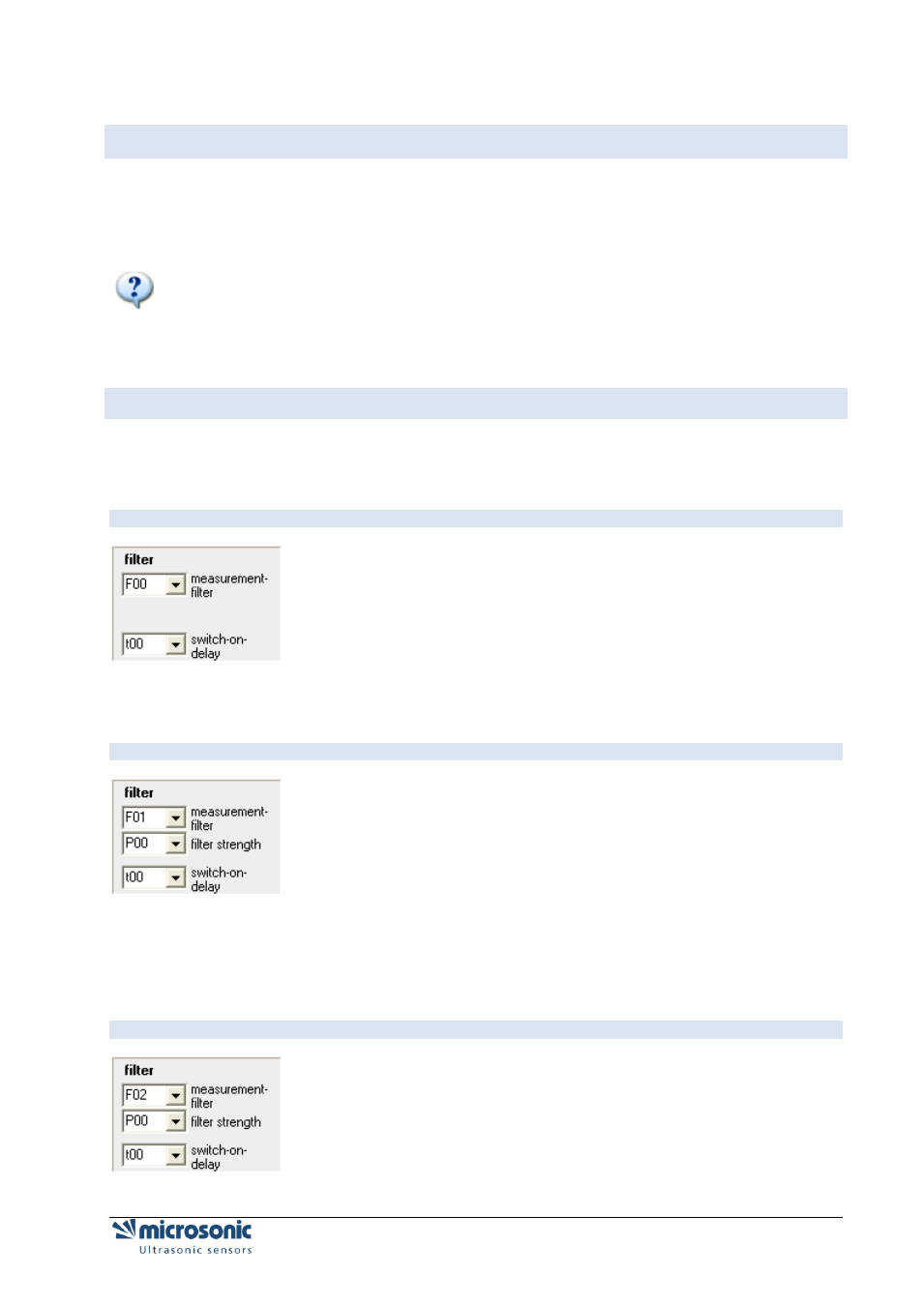
F00
Every measured distance value takes effect on the output unfiltered. This filter setting is used for real
measurement purposes, for example when the measured values are post-processed in a laboratory using
a PC
F01
When a target approaches the sensor the shortened distance is accepted at once. If the target withdraws
again the old distance is output using a hold time before the new value is valid. Employing this filter
method short time blanking of echoes is suppressed.
The advantage of this filtering can be seen in the fact that the sensor immediately reacts in one direction -
here on an object approach - whereas the withdrawal is attenuated.
F02