Beckhoff – BECKHOFF AX2000 CANopen communication profile User Manual
Page 74
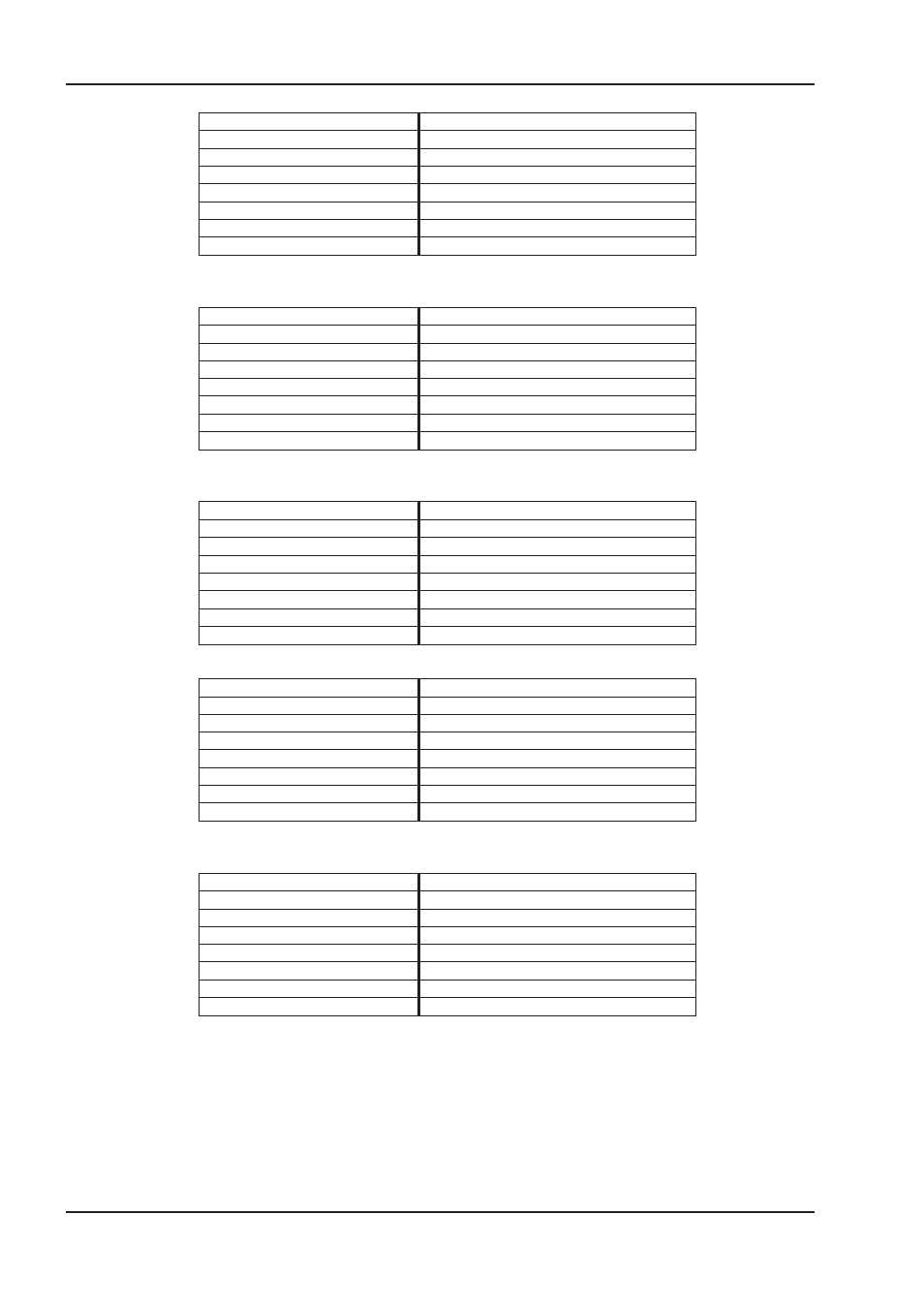
Sub-index
0B
h
Brief description
start delay for next motion task
Unit
ms
Access
rw
PDO mapping
not possible
Data type
UNSIGNED16
Value range
1 ... 65535
Default value
0
This Object is used to set a delay time for the start of the next motion task. To do this, the function
must be enabled through Sub-index 03
h
, Bit 7.
Sub-index
0C
h
Brief description
copy a motion task
Unit
—
Access
wo
PDO mapping
not possible
Data type
2 x UNSIGNED16
Value range
0 ... 180, 192... 255
Default value
0, 0
This Object can be used to copy motion tasks. The number that appears first in the CAN telegram
defines the source motion task, the following number defines the target motion task.
Sub-index
0D
h
Brief description
velocity weighting factor
Unit
—
Access
rw
PDO mapping
not possible
Data type
UNSIGNED16
Value range
0 ... 65535
Default value
1
This Object sets a multiplying factor for the velocity given in the RPDO motion block.
Sub-index
0E
h
Brief description
velocity for direct motion task
Unit
increments / 250μs, or dependent on resolution
Access
rw
PDO mapping
not possible
Data type
INTEGER32
Value range
-(2
31
-1) ... (2
31
-1)
Default value
0
This Object defines the velocity for the direct motion task (motion block 0). The type of motion task
then determines whether the velocity is evaluated in increments or in SI units.
Sub-index
0F
h
Brief description
Position setpoint CAN-Master-Slave
Unit
Increments / 250μs or depending on resolutio
Access
rw
PDO mapping
possible
Data type
INTEGER32
Value range
-(2
31
-1)..(2
31
-1)
Default value
0
This Object is used to specify the target position in position controller increments (2
20
incre-
ments/motor revolution) in Electronic Gear mode. This Object is located within Rx-PDO 41, whose
definition is fixed.
74
CANopen for AX2000/2500
CANopen Drive Profile
07/2007
BECKHOFF