5 pdo trajectory (33), 6 pdo motion block (34), Pdo trajectory (33) – BECKHOFF AX2000 CANopen communication profile User Manual
Page 43: Pdo motion block (34), Canopen drive profile
4.3.1.1.5
PDO Trajectory (33)
The Trajectory PDO is a time- and data-optimized PDO. This PDO must only be used in the Trajec-
tory mode. The Trajectory PDO must always be transmitted at constant time intervals (to be set with
the PTBASE command), otherwise there may be irregularities in the speed characteristic. This
PDO consists of two components: the incremental actual position values for two axes. The
assignment of the data for the axes, which must both be set to the same COB-ID for this RPDO
(Sub-index 01
h
of the corresponding communication parameters), is made through the Object
2721
h
.
Example of the calculation of the absolute position:
Position
incremental position value
2
20
=
The maximum difference between two incremental positions is given by the final limit speed that is
set (ASCII-command VLIM) – see example.
Example of the maximum incremental position difference:
max.achievable final speed / 1000
rev
min
0.016667
rev
ms
=
incr.pos.(t ) incr.pos.(t )
2
0.016667
17475
2
1
20
-
£
´
=
Depending on the amplifier parameters that have been set, there may be a larger or smaller lag/fol-
lowing error. If the error message contouring error appears and the axis is stopped with the emer-
gency ramp, there are several possible reasons:
l
The selected incremental position difference is too large (see above).
l
The contouring error window has been set too small (Object 2020
h
Sub-index 03
h
)
l
The amplifier parameters have not been set up optimally.
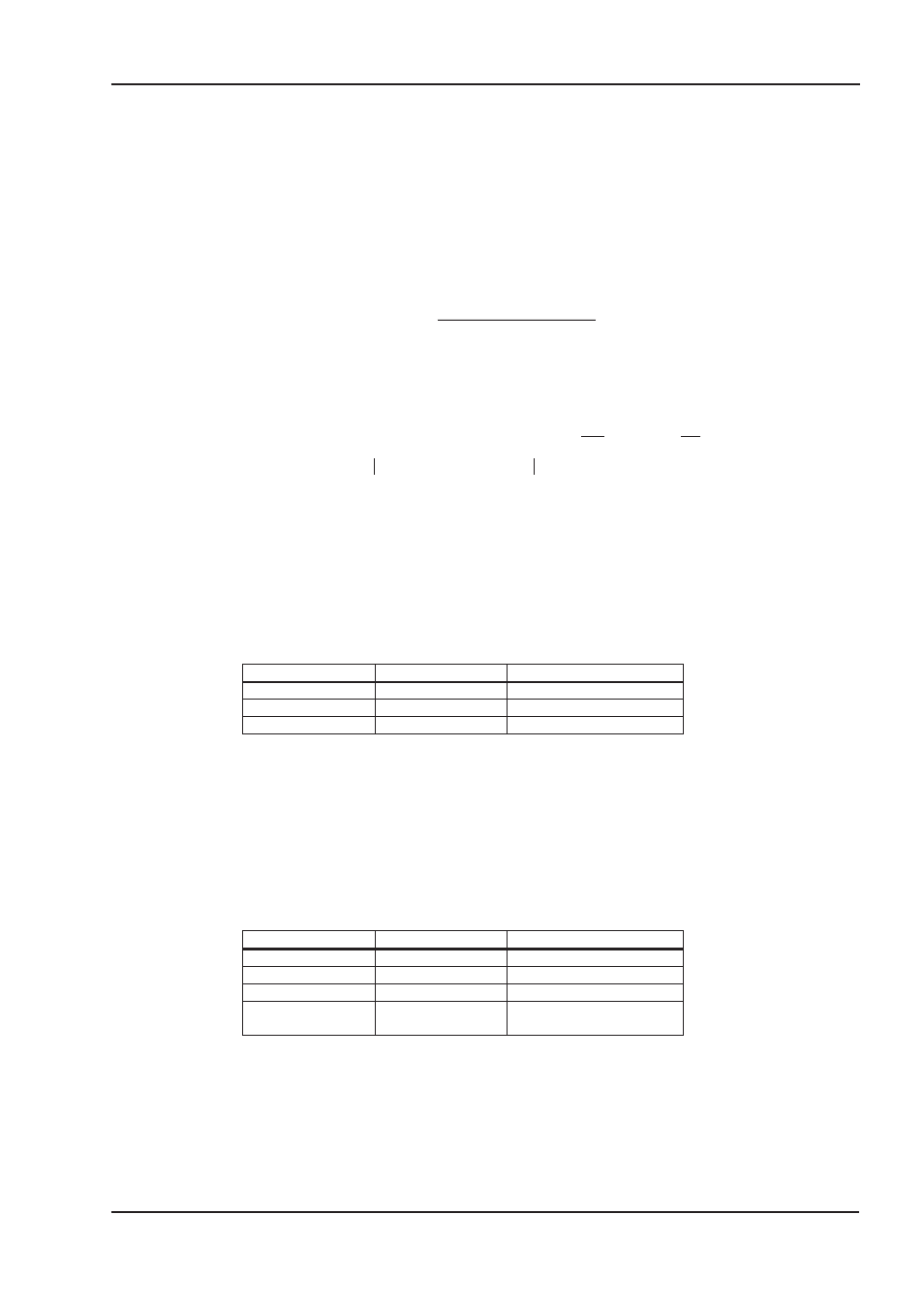
The table shows the mapping of the Trajectory PDO:
Sub-index
Value
Description
00
h
2
h
number of entries
01
h
20220420
h
incremental position
02
h
20220420
h
incremental position
This Object does not support transmission type 255 (asynchronous).
4.3.1.1.6
PDO Motion Block (34)
The Motion Block PDO is put together from the position (SIGNED32, weighted), speed (UNSIG-
NED16) and the type of motion tasks (UNSIGNED16).
The PDO starts a motion block from the volatile motion block memory (motion block number = 0)
and can only be used in the Position mode.
The table shows the mapping for the Motion Block PDO:
Sub-index
Value
Description
00
h
3
h
number of entries
01
h
20220120
h
position
02
h
20220210
h
speed
03
h
20220310
h
motion task type
(absolute/relative)
This Object only supports transmission type 255 (asynchronous).
CANopen for AX2000/2500
43
BECKHOFF
07/2007
CANopen Drive Profile