5 example of motion block processing, Example of motion block processing, Beckhoff – BECKHOFF AX2000 CANopen communication profile User Manual
Page 120
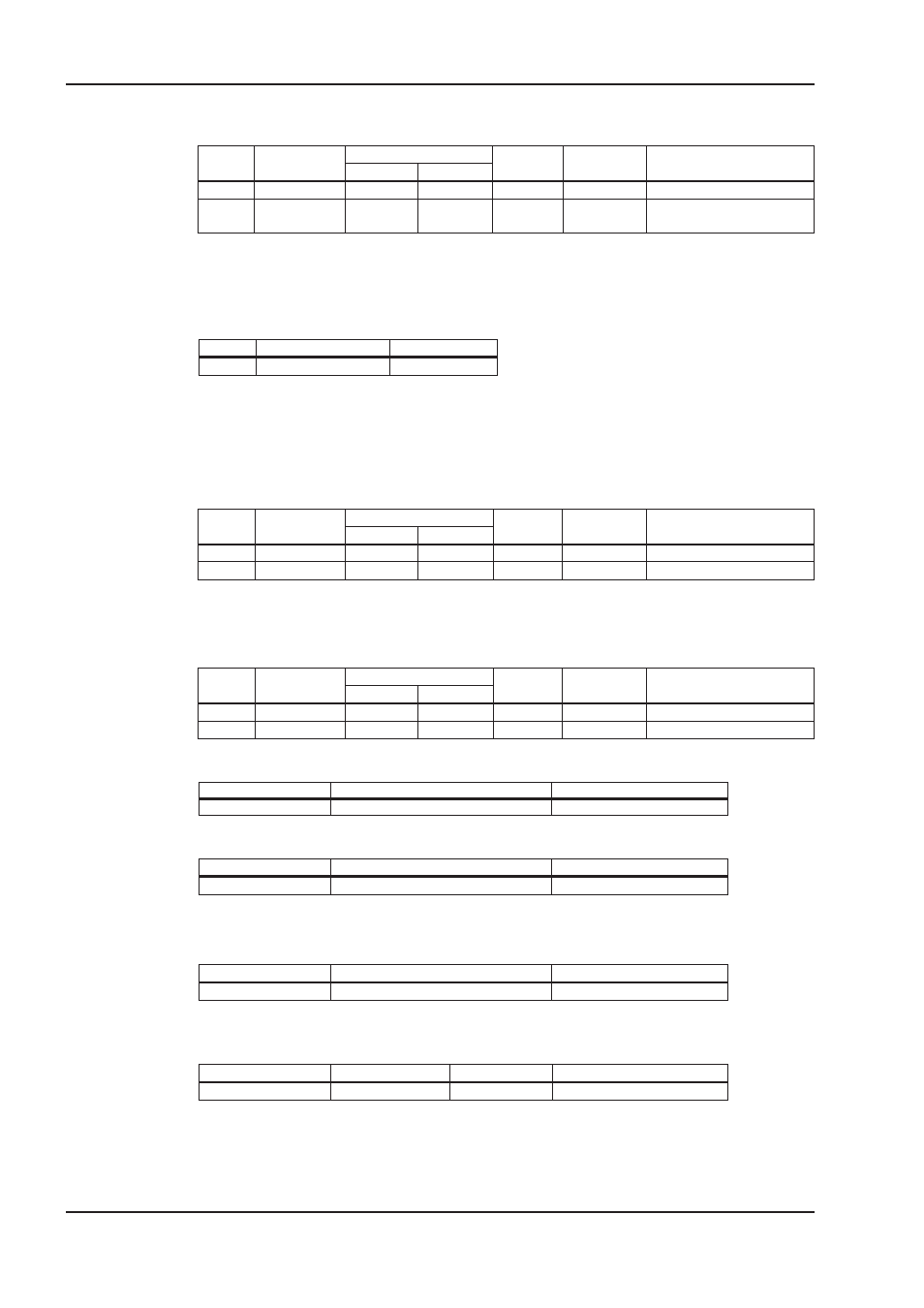
The homing movement can now be started by Bit 4 of the CANopen control word:
COB-ID
Control byte
Index
Sub-
index
Data
Comment
Low byte
High byte
601
2B
40
60
00
h
1F 00 00 00
mode
581
60
40
60
00
h
00 00 00 00
homing runs until home
conditions are fulfilled
A positive edge transition of the Reference point set bit in the manufacturer-specific status register
can be used to detect that the servo drive has calibrated (zeroed) its position system. The homing
procedure is terminated by the reset of the Motion task active bit.
A TPDO1 could therefore look like this:
COB-ID
Data
Comment
181
05 27 00 00 0A 54
mode
The status of the homing movement can be seen from the enhanced status register, Bit 17 (Refer-
ence point set).
6.1.5
Example of Motion Block Processing
Switch on position control
COB-ID
Control byte
Index
Sub-
index
Data
Comment
Low byte
High byte
601
2F
60
60
00
h
FF 00 00 00 position control mode
581
60
60
60
00
h
00 00 00 00
position control switched on
Map the second receive-PDO:
(Start motion block, motion blocks for the example are already defined. 1
st
receive-PDO is set to the
standard setting: control word.)
COB-ID
Control byte
Index
Sub-
index
Data
Comment
Low byte
High byte
601
2F
01
26
00
h
23 00 00 00
start motion block Object
581
60
01
26
00
h
00 00 00 00
OK, mapped
Switch NMT status machine to operational:
COB-ID
Command specifier (CS)
Node-ID
0
1
1
Access second receive-Object
COB-ID
Motion block number: Low
Motion block number: High
301
01
00
Response: none, the given motion block 1 is being processed.
Motor Quick Stop
COB-ID
Control: Low
Control: High
201
03
00
Response: none, motor is stopped with t_not.
Disable controller:
COB-ID
Control: Low
Control: High
Motion block number
201
03
00
1
Response: none, drive is without torque.
120
CANopen for AX2000/2500
Appendix
07/2007
BECKHOFF