Beckhoff – BECKHOFF AX2000 CANopen communication profile User Manual
Page 134
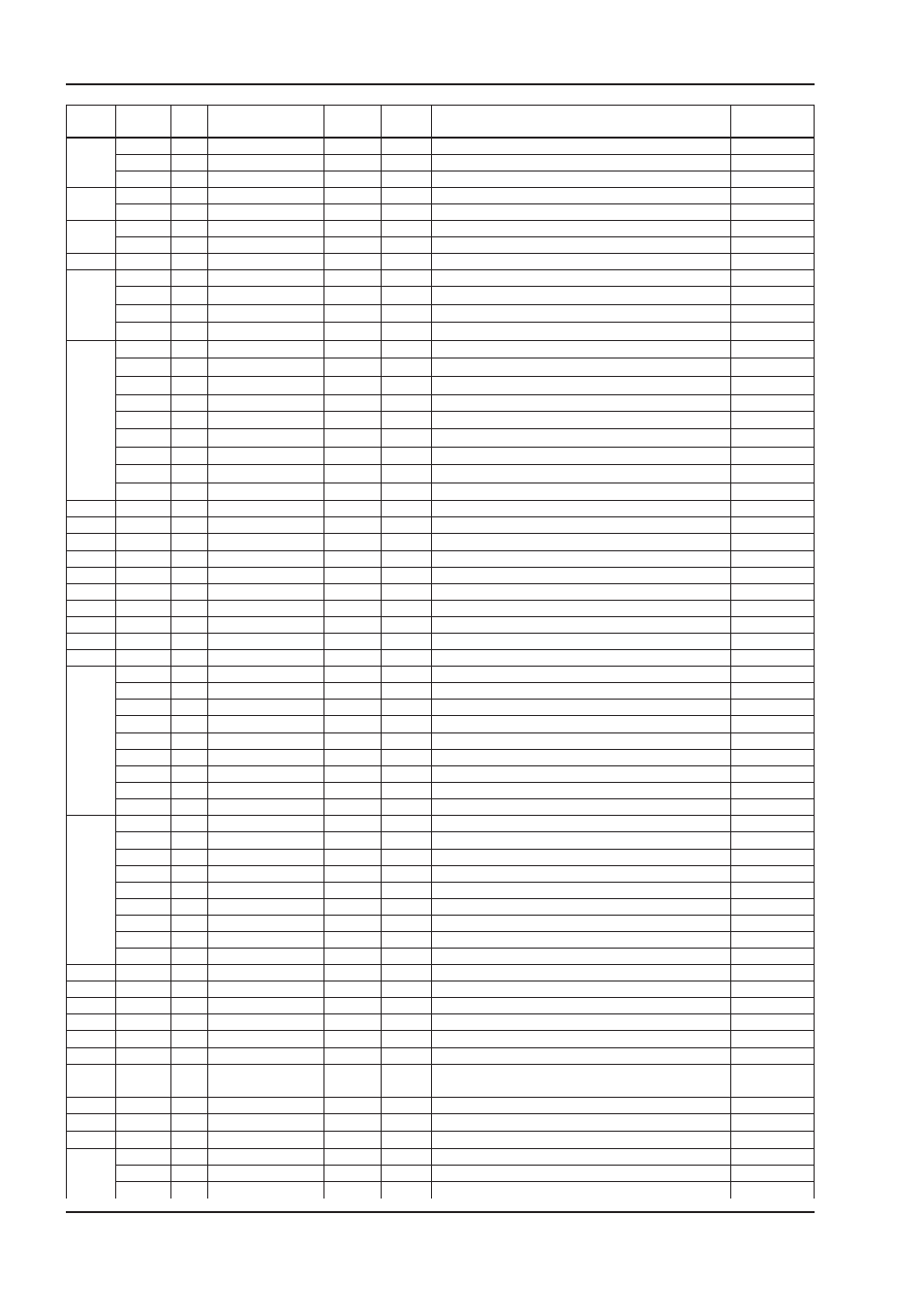
Index
Sub-
index
DEF
Data format
Access
PDO
mapp.
Description
ASCII Object
2083
h
00
h
S
INTEGER8
ro
—
32/24-bit negative latch
—
01
h
S
INTEGER32
ro
ý
32-bit latch
LATCH32N
02
h
S
INTEGER24
ro
ý
24-bit latch
—
2084
h
00
h
S
INTEGER8
ro
—
16-bit positive latch
—
01
h
S
INTEGER16
ro
ý
16-bit latch
LATCH16
2085
h
00
h
S
INTEGER8
ro
—
16-bit negative latch
—
01
h
S
INTEGER16
ro
ý
16-bit latch
LATCH16N
2086
h
00
h
S
UNSIGNED16
ro
ý
Position trigger word
POSRSTAT
2087h
00h
S
RECORD
ro
—
Latch positions Input 1
—
01h
S
INTEGER32
ro
ý
Latch position input 1, positive edge
LATCHX32
02h
S
INTEGER32
ro
ý
Latch position input 1, negative edge
LATCHX32N
03h
S
UNSIGNED8
rw
ý
Latch enable for inputs 1 and 2
—
2090
h
00
h
S
ARRAY
ro
ý
DP-Ram variables, write only (PDO)
-
01
h
S
INTEGER32
ro
ý
DP-Ram Variable 1
DPRVAR1
02
h
S
INTEGER32
ro
ý
DP-Ram Variable 2
DPRVAR2
03
h
S
INTEGER32
ro
ý
DP-Ram Variable 3
DPRVAR3
04
h
S
INTEGER32
ro
ý
DP-Ram Variable 4
DPRVAR4
05
h
S
INTEGER32
ro
ý
DP-Ram Variable 5
DPRVAR5
06
h
S
INTEGER32
ro
ý
DP-Ram Variable 6
DPRVAR6
07
h
S
INTEGER32
ro
ý
DP-Ram Variable 7
DPRVAR7
08
h
S
INTEGER32
ro
ý
DP-Ram Variable 8
DPRVAR8
2600
h
00
h
S
INTEGER8
rw
—
1
st
receive-PDO select
—
2601
h
00
h
S
INTEGER8
rw
—
2
nd
receive-PDO select
—
2602
h
00
h
S
INTEGER8
rw
—
3
rd
receive-PDO select
—
2603
h
00
h
S
INTEGER8
rw
—
4
th
receive-PDO select
—
2721
h
00
h
S
INTEGER8
rw
—
Configuration receive-PDO 33
—
2A00
h
00
h
S
INTEGER8
rw
—
1
st
transmit-PDO select
—
2A01
h
00
h
S
INTEGER8
rw
—
2
nd
transmit-PDO select
—
2A02
h
00
h
S
INTEGER8
rw
—
3
rd
transmit-PDO select
—
2A03
h
00
h
S
INTEGER8
rw
—
4
th
transmit-PDO select
—
3100
h
00
h
S
Visible String
rw
—
ASCII character direction
—
3500
h
00
h
S
RECORD
ro
—
Start of Object Channel
—
01
h
S
UNSIGNED16
ro
—
Total number of Objects in Object Channel
MAXSDO
02
h
S
UNSIGNED16
ro
—
Lower limit value
—
03
h
S
UNSIGNED16
ro
—
Upper limit value
—
04
h
S
UNSIGNED16
ro
—
Default value
—
05
h
S
UNSIGNED8
ro
—
Data format of Object
—
06
h
S
UNSIGNED32
ro
—
Check data
—
07
h
S
—
—
—
reserved
—
08
h
S
—
—
—
reserved
—
3501
h
00
h
S
RECORD
ro
—
Acceleration ramp: speed control
—
01
h
S
UNSIGNED16
ro
—
Value
ACC
02
h
S
UNSIGNED16
ro
—
Lower limit value
—
03
h
S
UNSIGNED16
ro
—
Upper limit value
—
04
h
S
UNSIGNED16
ro
—
Default value
—
05
h
S
UNSIGNED8
ro
—
Data format of Object
—
06
h
S
UNSIGNED32
ro
—
Check data
—
07
h
S
—
—
—
reserved
—
08
h
S
—
—
—
reserved
—
6040
h
00
h
4
INTEGER16
wo
ý
DS402 control word
—
6041
h
00
h
4
INTEGER16
ro
ý
DS402 Status
—
605A
h
4
INTEGER16
rw
—
Quick Stop option code
—
6060
h
00
h
4
INTEGER8
wo
ý
Mode of Operation
—
6061
h
00
h
4
INTEGER8
ro
ý
Display Mode of Operation
—
6063
h
00
h
4
INTEGER32
ro
ý
Incr. actual position
—
6064
h
00
h
4
INTEGER32
ro
ý
Actual position
(taking account of gearing factors)
—
606C
h
00
h
4
INTEGER32
ro
ý
Actual speed (mode: pv)
—
6077
h
00
h
4
INTEGER16
ro
ý
Torque actual value
IQ
607A
h
00
h
4
INTEGER32
rww
ý
Target position (mode: pp)
—
607B
h
00
h
4
ARRAY
ro
—
position_range_limit
—
01
h
4
INTEGER32
rw
—
min_position_range_limit
—
02
h
4
INTEGER32
rw
—
max_position_range_limit
—
134
CANopen for AX2000/2500
Appendix
07/2007
BECKHOFF