13 feedback, 49ff – BECKHOFF AX2500 User Manual
Page 49
8.13
Feedback
Every closed servo system will normally require at least one feedback device for sending
actual values from the motor to the servo drive. Depending on the type of feedback
device used, information will be fed back to the servo amplifier using digital or analog
means.
AX2500 supports the most common types of feedback device whose functions must be
assigned with the parameters
FBTYPE
(screen page FEEDBACK), primary Feedback
EXTPOS
(screen page POSITION), secondary Feedback
GEARMODE
(screen page GEARING), secondary Feedback
in the setup software. Scaling and other settings must always be made here.
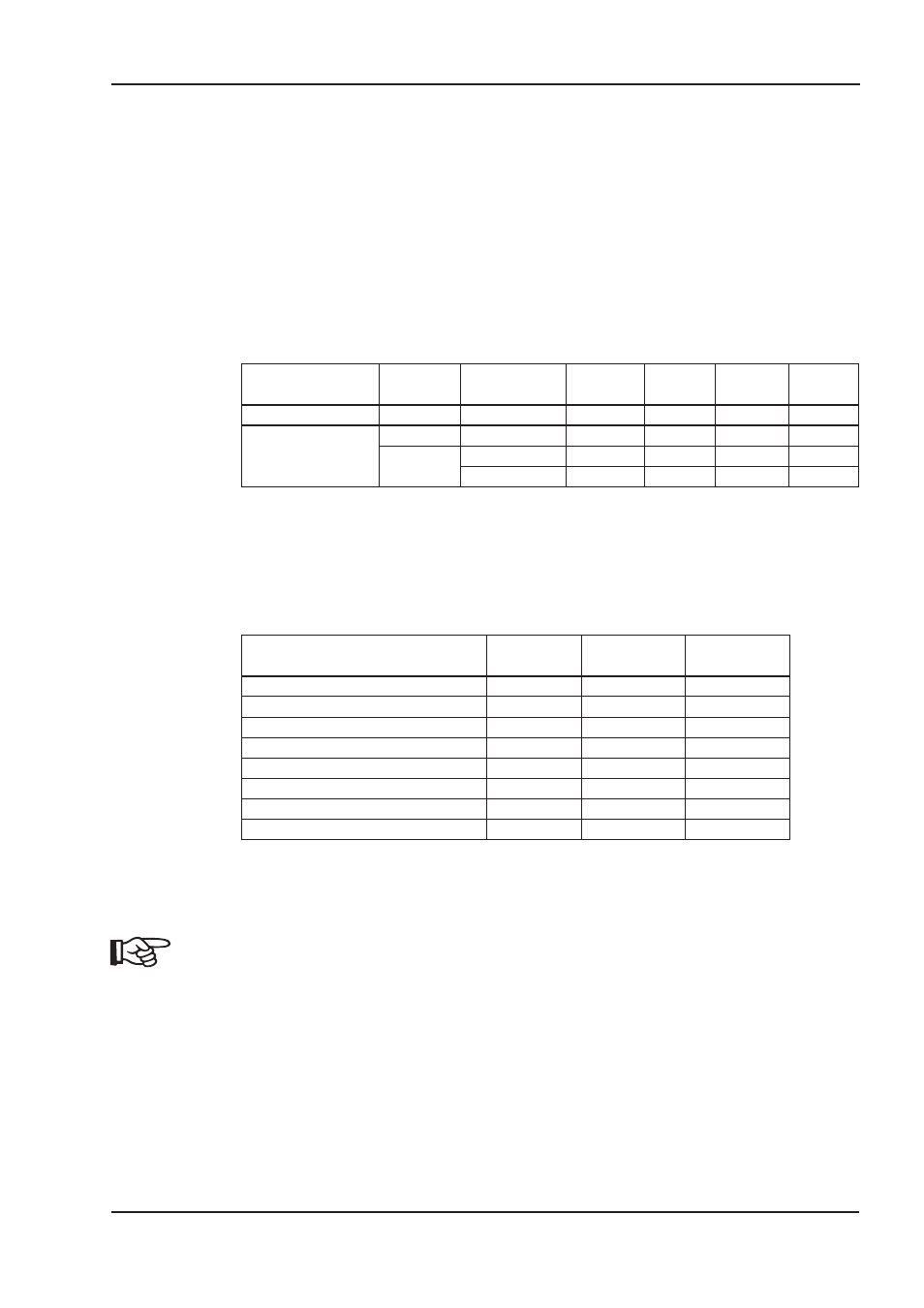
Configuration
Location
ASCII
Parameter
Commu-
tation
Speed
control
Position-
control
electr.
gearing
One Feedback
motor
FBTYPE
X
X
X
Two Feedbacks
motor
FBTYPE
X
X
externally
EXTPOS
X
GEARMODE
X
For a detailed description of the ASCII parameters, please refer to the online help of the
setup software.
The table below provides an overview of the supported feedback types, their correspond-
ing parameters and a reference to the relevant connection diagram in each case. On
each of these, the pin assignment shown on the encoder side relates to the BECKHOFF
motors.
Primary feedback type
Connector
Wiring
diagram
FBTYPE
Resolver
X5
ð S.50
0, 3
SinCos Encoder BISS
X2
ð S.51
20*
SinCos Encoder ENDAT
X2
ð S.52
3, 4
SinCos Encoder HIPERFACE
X2
ð S.52
2, 3
SinCos Encoder w/o data channel
X2
ð S.53
6, 7 (16*)
SinCos Encoder + Hall
X2
ð S.54
11*
RS422 5V
X4
ð S.55
8*, 9*
Sensorless (w/o feedback)
-
-
10*
* Can only be set on the terminal screen of the setup software
** RS422 means “incremental encoder AquadB”.
Hints for combining primary with secondary feedback systems for position
control/electr. gearing can be found from page 56.
AX2500 Product Manual
49
BECKHOFF
06/2007
Electrical Installation