Figure 17, Appendix g - profile torque mode (servo only), General mode description – Applied Motion ST10-C-CE User Manual
Page 85: Enable profile torque mode, Set running parameters, Enable drive operation
85
920-0025 Rev K
3/5/2015
CANopen User Manual
Appendix G - Profile Torque Mode (Servo Only)
General Mode Description
Profile Torque mode is a servo-control torque operating mode. It requires knowledge of the
Torque Constant of the motor in Nm/A. This information can be found in the motor print.
Enable Profile Torque Mode
To enable Profile Torque Mode, the value 0004
h
must be written to the mode of operation
OD entry, located at dictionary address 6060
h
.
The mode of operation can be verified using OD 6061
h
- mode of operation display - which
is updated when the current operation mode is accepted.
Set Running Parameters
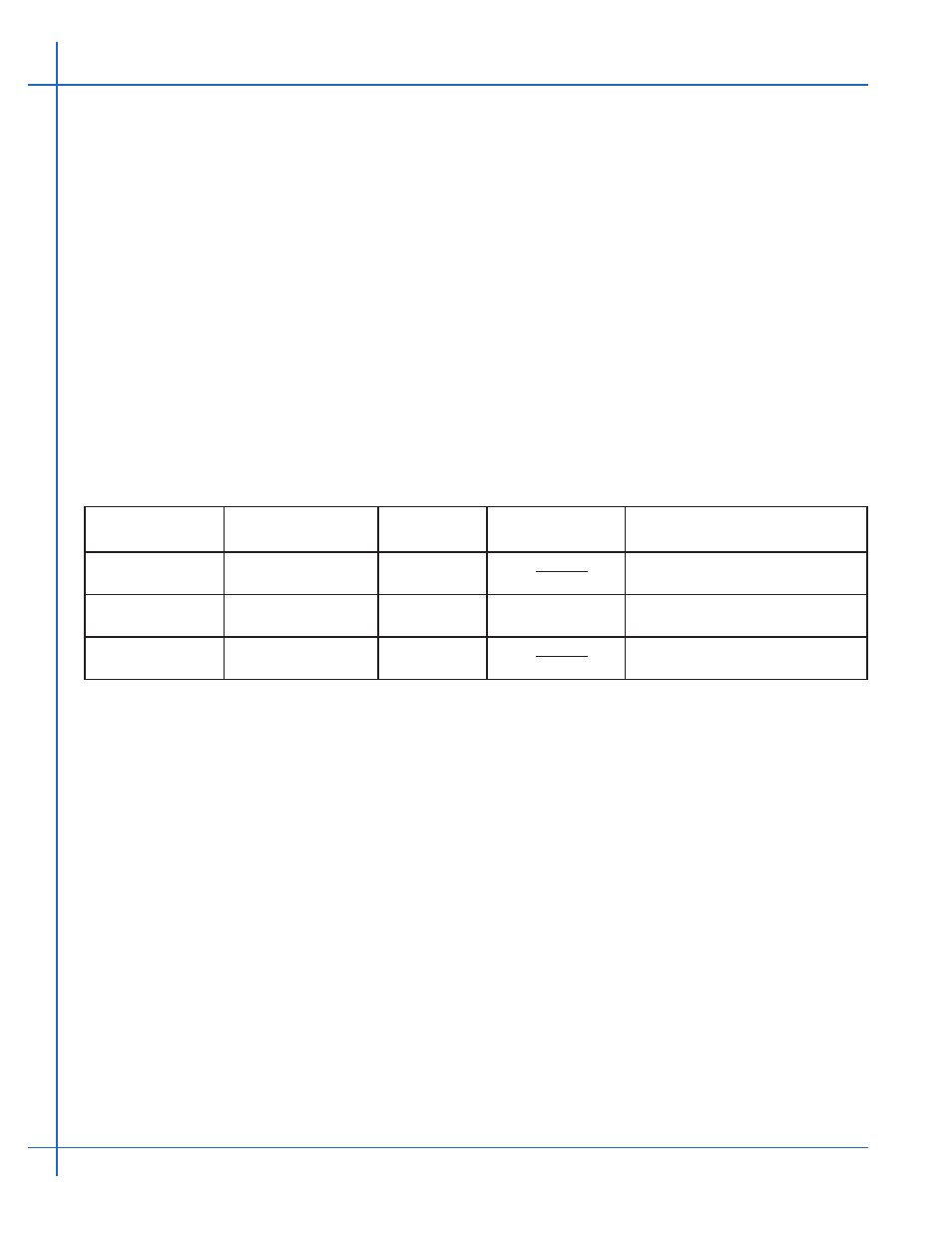
To operate in Profile Torque mode, the following parameters must be set:
Figure 17: Set Running Parameters
Enable Drive Operation
After power up or node reset, the drive is in disabled state. The value 0006
h
must be
written to the control word OD entry, located at dictionary address 6040
h
. This will put the drive
into “ready to switch on” state and is ready to enable drive operation. If the value 0006
h
is not
written to the control word first, the drive operation can not be enabled.
To enable drive operation, the value 000F
h
must be written to the controlword OD entry,
located at dictionary address 6040
h
. This puts the drive into the Operation Enabled state with
no torque applied.
It should be noted that both enabling the halt bit and setting the target torque to zero will
ramp down the torque applied to the motor according to the torque slope. At the end of the
slope no torque will be applied to the motor, allowing the shaft to move freely.
Parameter
Name
Object Dictionary
Entry
Length (in
bytes)
Units
Description
Torque Constant
7005
h
2
m • Nm
a
Motor paramter, found on the
motor print
Target Torque
6071
h
2
m • Nm
Torque to be applied to the
motor
Torque Slope
6087
h
4
m • Nm
sec
Rate at which to ramp torque to
new target