Table 1: bit rate switch settings, Drive configuration – Applied Motion ST10-C-CE User Manual
Page 11
11
920-0025 Rev K
3/5/2015
CANopen User Manual
The Node-ID is configured using a 16-position switch to set the lower 4 bits of the Node-ID
and a 8 position switch to set the upper 3 bits of the Node-ID. In some cases, the upper 3 bits
of the Node-ID are configured using ST Configurator™, Step-Servo Quick Tuner™ or our stan-
dard Quick Tuner™. Please reference the drive’s hardware manual for Node-ID switch config-
uration and setup. Valid ranges for the Node-ID are 01
h
through 7F
h
. Node-ID 00
h
is reserved
in accordance with the CiA 301 specification.
Note: The Node-ID and Bit Rate are captured only after a power cycle, or after a network
reset command has been sent. Changing the switches while the drive is powered on will NOT
change the Node-ID until one of those conditions has also been met.
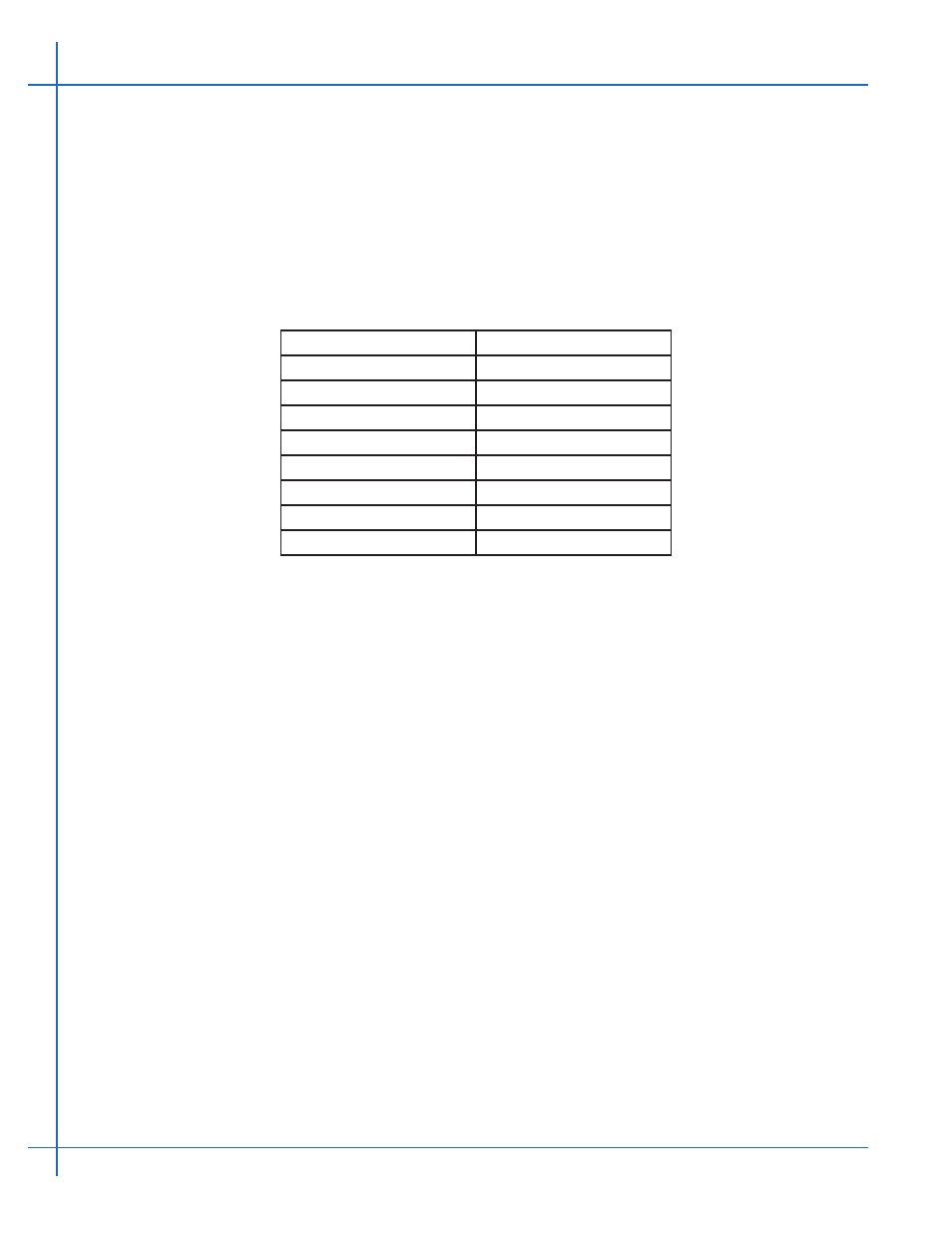
Switch Setting
Resultant Bit Rate
0
1 Mbps
1
800 kbps
2
500 kbps
3
250 kbps
4
125 kbps
5
50 kbps
6
20 kbps
7
12.5 kbps
Table 1: Bit Rate Switch Settings
Drive Configuration
Once the CAN connector has been wired to the drive, and the Node-ID and Bit Rate have
been set, the drive can be configured. Drive configuration for ST stepper drives and STM
Integrated Motors is accomplished using the ST Configurator™ software, which can be found
on the Applied Motion Products website. Drive configuration and tuning for servo drives are
performed using Quick Tuner™ or Step-Servo Quick Tuner™. In all cases the drive will need
to be connected to a Windows PC using the included RS-232 serial cable. Please refer to the
appropriate software manual or built-in help screens for details.
Note: When the CANopen drive is first powered on, the drive will automatically send a
power-up packet over the RS-232 port. If an Applied Motion Products application is present,
it will send a response back to the drive over RS-232 and the drive will hold the CAN node in
the Initialization state until the application is closed. If no response is detected, the drive will
continue the normal CANopen start up procedure: the drive will power up into the Initialization
state, send out a boot-up packet, move into the Pre-Operational state, and start sending out
heartbeats with the Pre-Operational state as a status code.