Command parameter list for fd-s series, 3 explicit messaging, Co mm u ni c a ting w ith t he fd -s s er ie s – KEYENCE DL-DN1 User Manual
Page 53
3-3 Explicit Messaging
3-25
3
Co
mm
u
ni
c
a
ting
w
ith t
he FD
-S
s
er
ie
s
- DeviceNet Compatible Network Unit DL-DN1 User’s Manual (FD-S) -
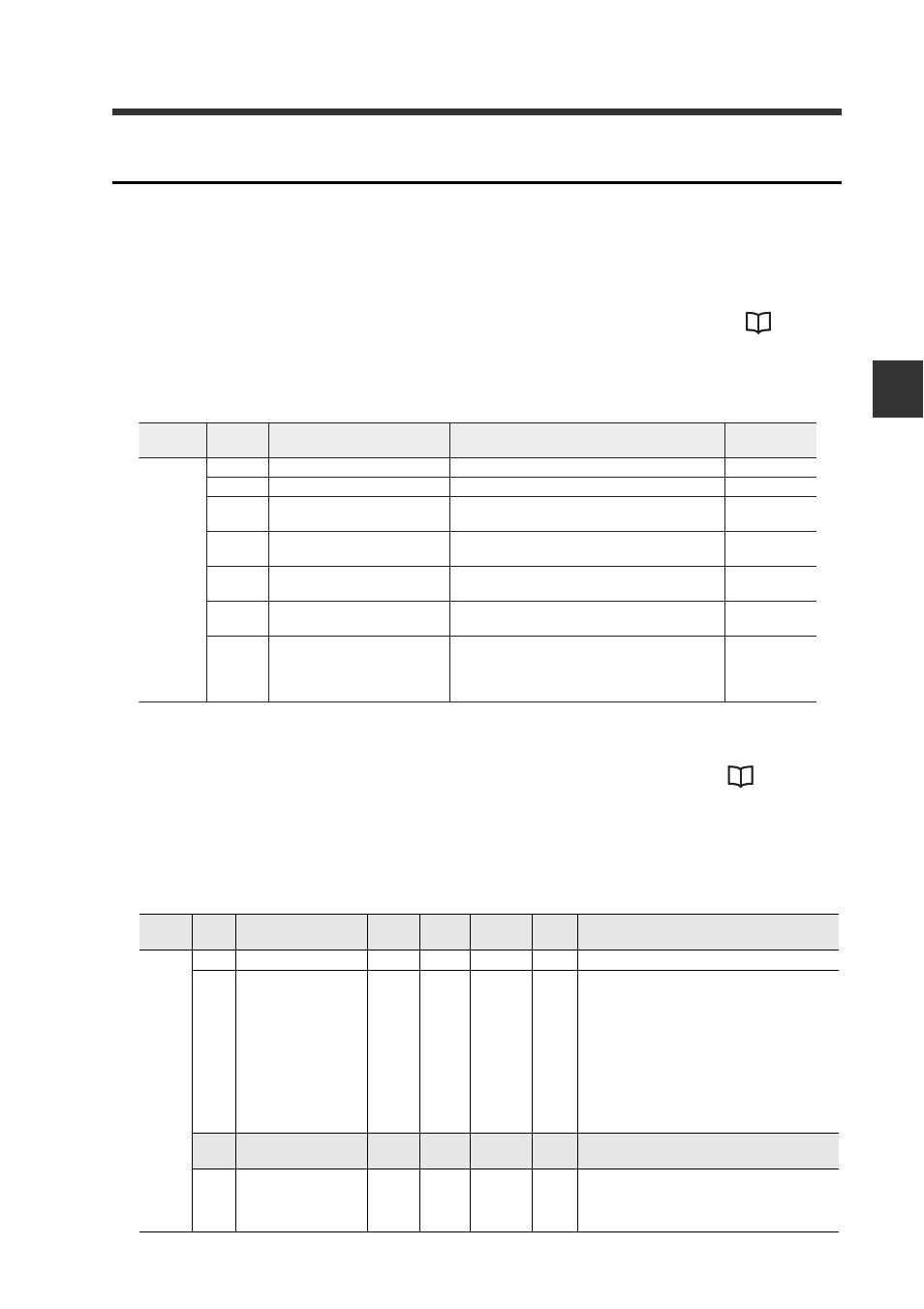
Command Parameter List for FD-S Series
The following tables provide command parameters for the FD-S series. The two types
of parameters are: motion command parameters and setting/status command
parameters.
Motion command parameters
For the communication methods using motion command parameters, see
a Motion Command to a Sensor Amplifier" (page 3-19).
Attribute R: Read; C: Motion command
N: ID number of sensor amplifier
Setting/status command parameters
For the communication methods using setting/status parameters, see
Writing Settings or Status of a Sensor Amplifier" (page 3-20).
Attribute R: Read; W: Write; R/W: Read/Write
N: ID number of sensor amplifier. For example, if the ID number is 13, then N x 10 + 3
-> 133 (DEC).
The data types are DINT unless explicitly specified.
InstID
(DEC)
AttrID
(HEX)
Name
Description
Attrib ute
N
64
Group-0 entr y count
FD-SA*A:6, FD-SA*:5
R
65
Zero adjustment request
Ex ecutes z ero adjustment.
C
66
Integrated fl
ow quantity reset
request
Resets integrated fl
ow quantity .
C
67
Instantaneous fl
ow hold v alue
reset request
Resets instantaneous fl
ow hold va lu e.
C
68
Te mperature hold v alue reset
request
Resets temperature hold v alue .
C
69
Initial reset request (ALL)
Resets all settings of the sensor ampli fi
er to
the f actor y def ault settings .
C
6A
Initial reset (SLct)
Resets the sensor ampli fi
er to the f actor y
def ault settings ., e xcept f or some items such
as z ero adjustment.
Av ailab le only to FD-S (v ersion A) .
C
InstID
(DEC)
AttrID
(HEX)
Name
Description Attribute
Sensor
head
Default
value
Parameter range
Nx10+1
64
Group-1 entry count
R
-
21
65
Error state
*1
R
-
-
Bit 0: Always 0
Bit 1: Head connection error
Bit 2: Overcurrent Error
Bit 3: EEPROM Error
Bit 4: No fl ow error
Bit 5: Backflow error
Bits 6 - 8: Always 0
Bit 9: Drive gain error
Bit 10: Temperature lower error
Bit 11: Temperature high error
Bits 12 - 15: Always 0
66 to
67
System reserved
68
Output terminal state
*2
R
-
-
Bit 0: Output 1
Bit 1: Output 2
Bit 2: Output 3
Bits 3 - 15: Always 0