5 troubleshooting, 1 robotic arm, 2 balance – Metrohm 864 Robotic Balance Sample Processor User Manual
Page 75: Robotic arm, Balance
■■■■■■■■■■■■■■■■■■■■■■
5 Troubleshooting
864 Robotic Balance Sample Processor
■■■■■■■■
67
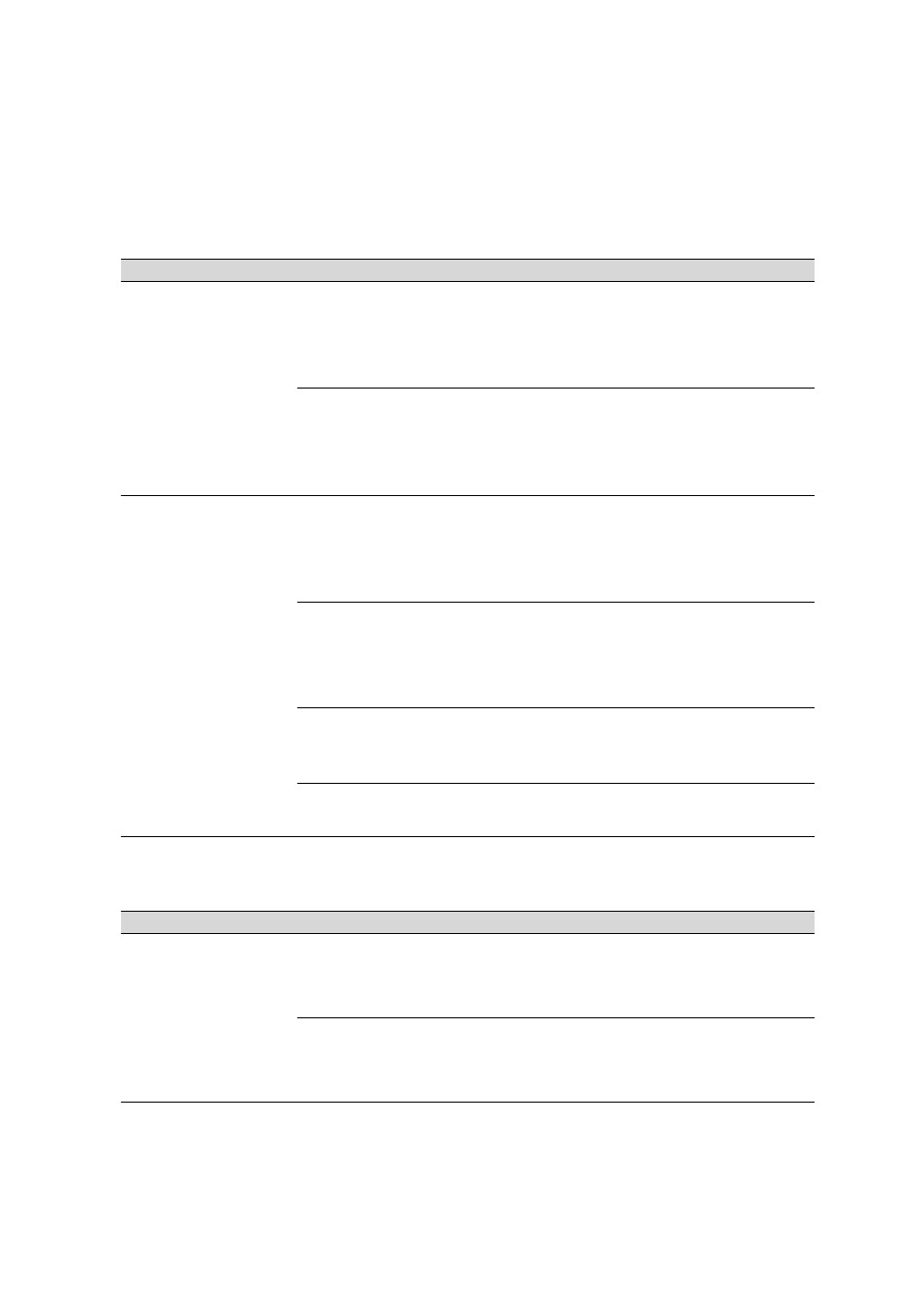
5 Troubleshooting
5.1
Robotic arm
Problem
Cause
Remedy
The robotic arm
moves all the way
outward and buz-
zes.
Sample Processor – The
Swing Head is not correctly
configured.
In the control software under "Configuration"
(or under "Device manager" for Touch Con-
trol), enter the correct value for the Swing
offset.
Sample Processor –
Robotic arm is wrongly
mounted.
Disconnect the mains plug and dismount the
robotic arm. Check the configuration of the
robotic arm and mount it correctly if necessary
(left-swinging
⇔ right-swinging).
The Swing Head
either misses the
rack positions
totally or is inaccu-
rate
Sample Processor – The
Swing Head is not correctly
configured.
In the control software under "Configuration"
(or under "Device manager" for Touch Con-
trol), enter the correct values for the Swing
radius, Swing offset etc.
Sample Processor – The
axial distance is not cor-
rectly configured.
In the control software under "Configuration"
(or under "Device manager" for Touch Con-
trol), enter the correct value for the Axial dis-
tance.
Sample Processor – The
wrong rack table is being
used.
Initialize the rack using the function Initialize
rack in the "Manual control".
Swing Head – The Swing
Head drive is defective.
Contact the Metrohm Service.
5.2
Balance
Problem
Cause
Remedy
The sample size is
not or not correctly
received.
The parameters of the
RS-232 interface are
wrongly set.
Correct the RS-232 parameters (see page
39ff). They have to match with those of the
balance.
The connection cable is
unsuitable.
Use the RS-232 cable of the balance manufac-
turer or ask for the corresponding cable from
Metrohm.