Metrohm 864 Robotic Balance Sample Processor User Manual
Page 64
3.19 Adjusting the lift positions
■■■■■■■■■■■■■■■■■■■■■■
56
■■■■■■■■
864 Robotic Balance Sample Processor
■
Under Target position, select the entry Special position and
click [Start].
The lift travels downward and is intended to take up the pipetting
tip with the adapter. The adapter must press down forcefully onto
the pipetting tip. If necessary, move the lift one millimeter at a
time.
■
Under Lift position, click the arrow button [down] or [up] in
order to set a suitable position.
The pipetting tip must rest close against the adapter. The lift may not
however be lowered too far, because otherwise the lift drive could
become overloaded and suffer damage.
If the lift position has been corrected, the current lift position has to
be set as new special position.
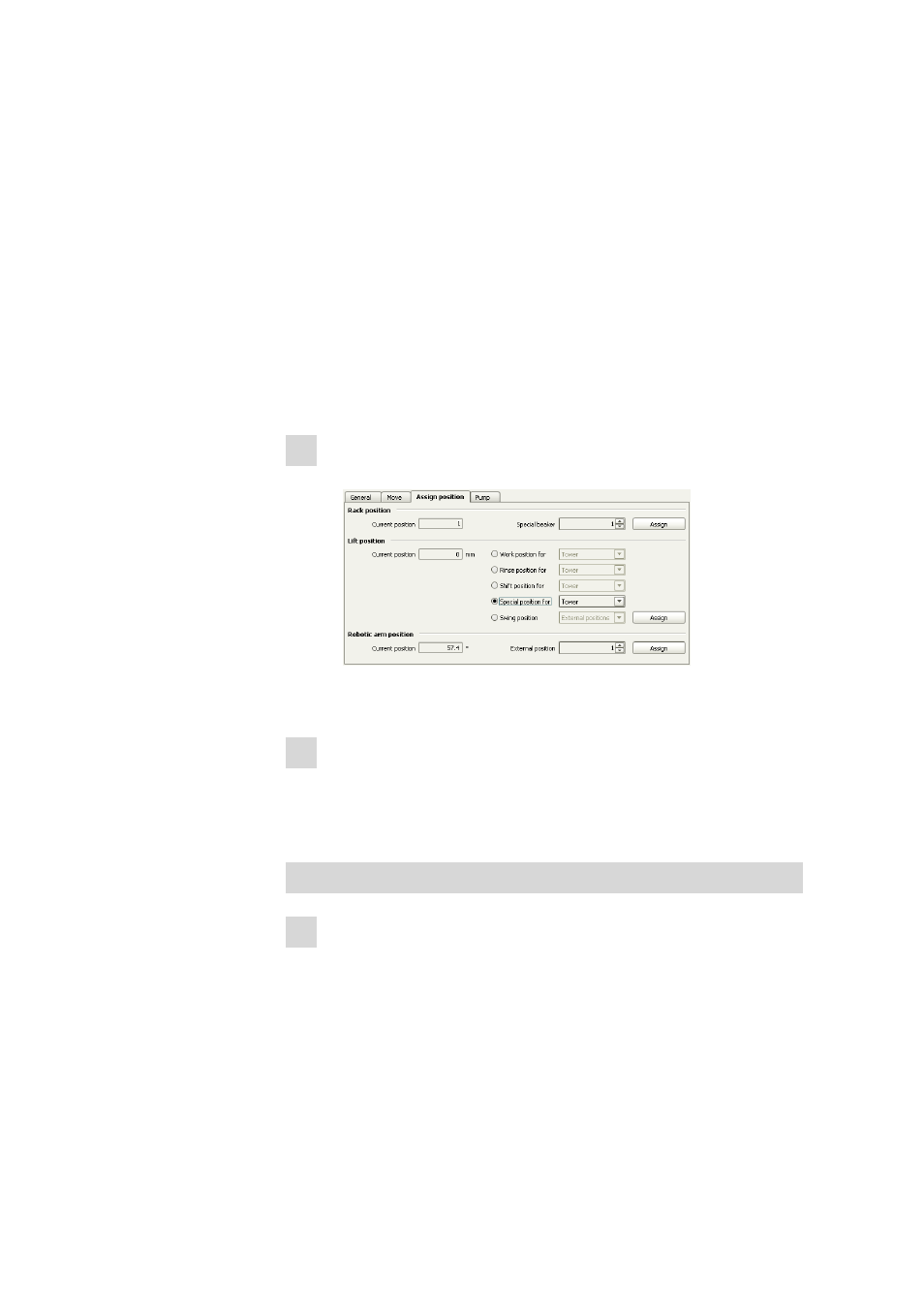
2 Assign the position
■
Click the tab Assign position.
■
Under Lift position, select the setting Special position for
tower and click [Assign].
3 Move the lift upwards
■
Click the tab Move.
■
Under Lift position, select the Shift position as Target posi-
tion and click [Start].
Lift positions for stripping pipetting tips
1 Move to the external position 1
■
Under Robotic arm position, select External 1 as Target
position and click [Start].
■
Under Lift position, select Work position as Target position
and press [Start].
The robotic arm with the pipetting tip is now located in front of the
deflector. The thick sleeve of the adapter should be approx. 1 cm
underneath the deflector.