Rockwell Automation TLAR Electric Cylinders User Manual
Page 18
18 TL-Series Electric Cylinders
Rockwell Automation Publication TLAR-IN001B-EN-P - February 2014
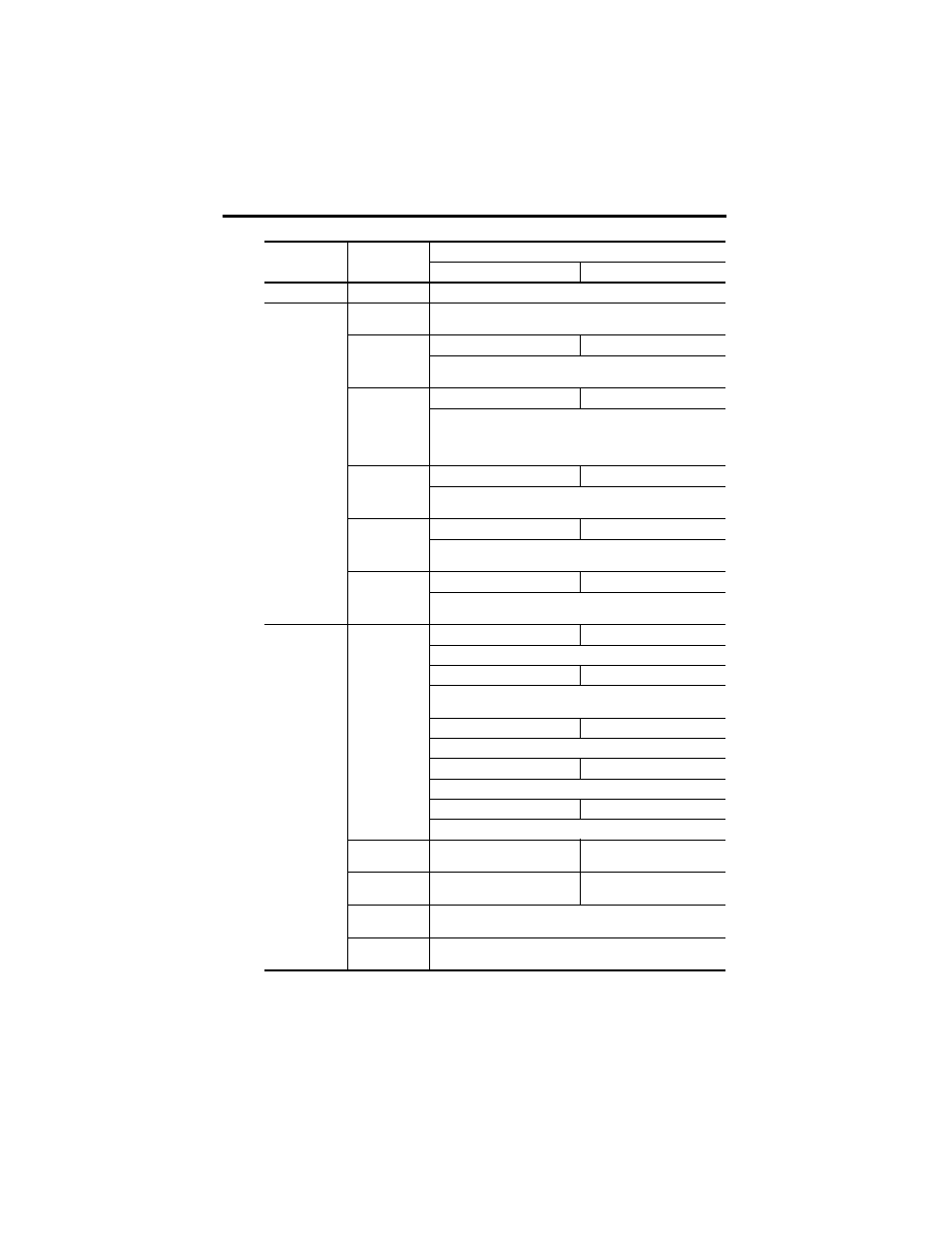
Axis Properties
Tab
Parameter
Entry/Selection, with applicable distance unit settings
Metric
English
Conversion Positioning
Mode
Linear
Setting the Positioning Mode to Rotary can cause damage to the electric
cylinder or the machine due to incorrect positioning.
Conversion
Constant
66666.667 drive cnts/1.0 mm for
1693333.3 drive cnts/1.0 in. for
TLAR-x1xxxB-B2A
TLAR-x1xxxB-B4A
Conversion
Constant
20000 drive cnts/1.0 mm for
508000 drive cnts/1.0 in. for
TLAR-x1xxxE-B2A
TLAR-x1xxxE-B4A
TLAR-x3xxxE-B2A
TLAR-x3xxxE-B4A
Conversion
Constant
40000 drive cnts/1.0 mm for
1016000 drive cnts/1.0 in. for
TLAR-x2xxxC-B2A
TLAR-x2xxxC-B4A
Conversion
Constant
15748.0315 drive cnts/1.0 mm for
400000 drive cnts/1.0 in. for
TLAR-x2xxxF-B2A
TLAR-x2xxxF-B4A
Conversion
Constant
10000 drive cnts/1.0 mm for
254000 drive cnts/1.0 in. for
TLAR-x3xxxH-B2A
TLAR-x3xxxH-B4A
Dynamics
Maximum Speed
(1)
(1)
The default value is 5% more than your actuator rated maximum speed. Do not command maximum speed in your application in
excess of the rated speed.
150 mm/s (default 157.5 mm/s)
5.91 in/s (default 6.20 in/s)
TLAR-x1xxxB-xxA
500 mm/s (default 525 mm/s)
19.68 in/s (default 20.67 in/s)
TLAR-x1xxxE-xxA
TLAR-x3xxxE-xxA
250 mm/s (default 262.5 mm/s)
9.82 in/s (default 10.33 in/s)
TLAR-x2xxxC-xxA
640 mm/s (default 672 mm/s)
24.61 in/s (default 25.84 in/s)
TLAR-x2xxxF-xxA
1000 mm/s (default 1050 mm/s)
41.34 in/s (default 43.41 in/s)
TLARx3xxxH-xxA
Maximum
Acceleration
(2)
(2)
Accelerations in excess of the following can lead to reduction of life of your actuator.
6000 mm/s/s
236.22 in/s/s
Maximum
Deceleration
(2)
6000 mm/s/s
236.22 in/s/s
Maximum
Acceleration Jerk
Use default values, or adjust for your application.
Maximum
Deceleration Jerk
Use default values, or adjust for your application.