Bit map of command mode word, Bit map of axis status word – Rockwell Automation 1746-QS,D17466.19 SYNCHRONIZED AXES MODULE User Manual
Page 48
Using Processor Files
C–6
Publication 1746-6.19 March 1998
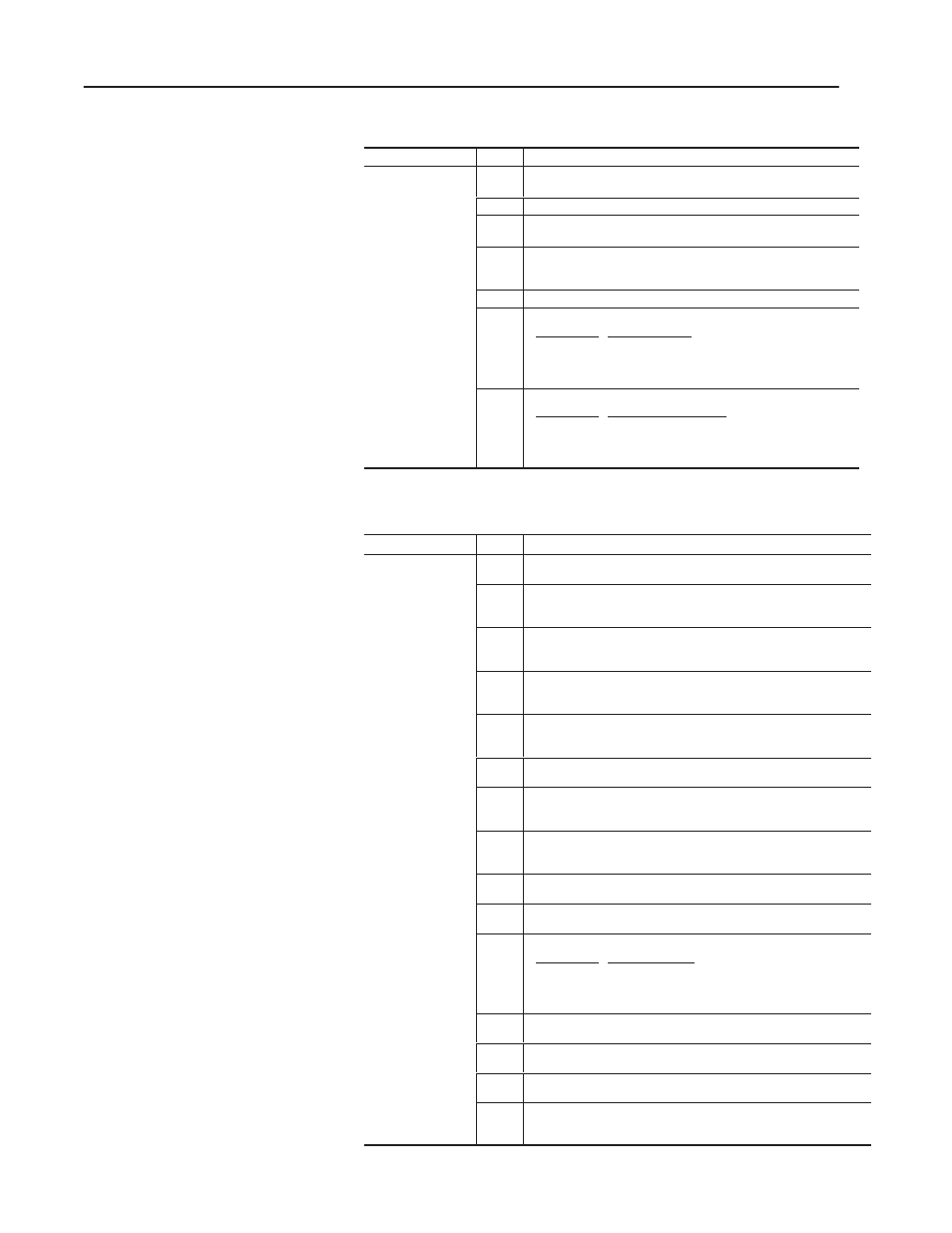
Bit Map of Command Mode Word
Word
Bit
Description
15
0 =
plots each move of the axis, overwwriting previous plot
1 =
disables axis plot to preserve the last plot
Command Mode
(Co
and word )
14-08
reserved
Co
and Mode
(Command word 0)
07
0 = disables S Curve
1 = module computes an S-curve target for smoother motion
06
0 = disables Quick Mode
1 = module ramps up to (max) drive output in open loop,
maintains it, then ramps down in closed loop axis limit
05-04
Synch A/B: Axes with same bit set are synchronized
03-02
Integrator Mode = bit combination
Bit 03 Bit 02 Integrator is Active
0
0
always
0
1
during DECEL and IN POSITION
1
0
during IN POSITION
1
1
never
01-00
Accel/Decel Mode = bit combination
Bit 01 Bit 00 Accel/Decel values define:
0
0
ramp rate in position units/sec/sec
0
1
ramp rate in 1000 position units/sec/sec
1
0
distance to SPEED
1
1
time to SPEED
Bit Map of Axis Status Word
Word
Bit
Description
15
0 =
LDT input OK
1 =
LDT input lost
14
0 =
LDT input OK
1 =
LDT input noisy
For hard/soft stop, see config auto-stop, bit 06
Axis Status
(Statu word 4)
13
0 =
LDT input OK
1 =
LDT input overflow
For hard/soft stop, see config auto-stop, bit 05
Axis Status
(Status word 4)
12
0 =
output drive power OK
1 =
output drive exceeds D/A range (insufficient drive power)
For hard/soft stop, see config auto-stop, bits 12 and 04
11
0 =
no parameter error detected
1 =
initialization or control parameter is out of bounds
For hard/soft stop, see config auto-stop, bits 11 and 03
10
0 =
no position overflow detected
1 =
actual position exceeded range of 16-bit number display
09
0 =
integrator windup OK
1 =
integrator value exceeded 20% or 80% (see config bit 00)
For hard/soft stop, see config auto-stop, bits 09 and 01
08
0 =
following error OK
1 =
difference between target and actual positions > max error
For hard/soft stop, see config auto-stop, bits 08 and 00
07
0/1 = toggles to acknowledge valid command or status request
received by the module
06
0 =
module not initialized (module is reset)
1 =
initialized with P command (axis ready for Go command)
05-04
State of target generator = bit combination
Bit 05 Bit 04 Target Generator is
0
0
stopped
0
1
accelerating
1
0
at constant speed
1
1
decelerating
03
0 =
axis in closed loop
1 =
axis in open loop, caused by O command or hard stop
02
0 =
axis movement
1 =
axis is halted, caused by H command, hard or soft stop
01
0 =
axis movement
1 =
axis speed < 500 transducer counts (cleared @ 1000 cts)
00
0 =
axis outside in-position window
1 =
difference between actual and command positions is less
then the in-position value