B. ttl serial – Pololu Maestro User Manual
Page 37
Mini SSC offset: This parameter determines which servo numbers the device will respond to in the Mini SSC
protocol (see
).
Timeout: This parameter specifies the duration before which a Serial timeout error will occur. This error can be
used as a safety measure to ensure that your servos and digital outputs go back to their default states whenever
the software sending commands to the Maestro stops working. The serial timeout error will occur whenever no
valid serial commands (or qualifying native USB commands) are received within the specified timeout period. A
timeout period of 0.00 disables the serial timeout error. The resolution of this parameter is 0.01 s and the maximum
value available is 655.35 s. The native USB commands that qualify correspond to the following methods in the Usc
class:
setTarget
,
setSpeed
,
setAcceleration
,
setPwm
,
disablePWM
, and
clearErrors
. Running the Maestro Control
Center will not prevent the serial timeout error from occurring, but setting targets in the Status tab or playing a
sequence will.
Never sleep (ignore USB suspend): By default, the Maestro’s processor will go to sleep and stop all of its operations
whenever it detects that it is only powered by USB (no VIN supply) and that the USB has entered the Suspend State.
However, this behavior can be disabled by checking the Never sleep checkbox.
5.b. TTL Serial
The Maestro’s serial receive line, RX, can receive bytes when connected to a logic-level (0 to 4.0–5 V, or “TTL”),
non-inverted serial signal. The bytes sent to the Maestro on RX can be commands to the Maestro or an arbitrary
stream of data that the Maestro passes on to a computer via the USB port, depending on which serial mode the
Maestro is in (
). The voltage on the RX pin should not go below 0 V and should not exceed 5 V.
The Maestro provides logic-level (0 to 5 V) serial output on its serial transmit line, TX. The bytes sent by the Maestro
on TX can be responses to commands that request information or an arbitrary stream of data that the Maestro is
receiving from a computer via the USB port and passing on, depending on which Serial Mode the Maestro is in. If
you aren’t interested in receiving TTL serial bytes from the Maestro, you can leave the TX line disconnected.
The serial interface is asynchronous, meaning that the sender and receiver each independently time the serial
bits. Asynchronous TTL serial is available as hardware modules called “UARTs” on many microcontrollers.
Asynchronous serial output can also be “bit-banged” by a standard digital output line under software control.
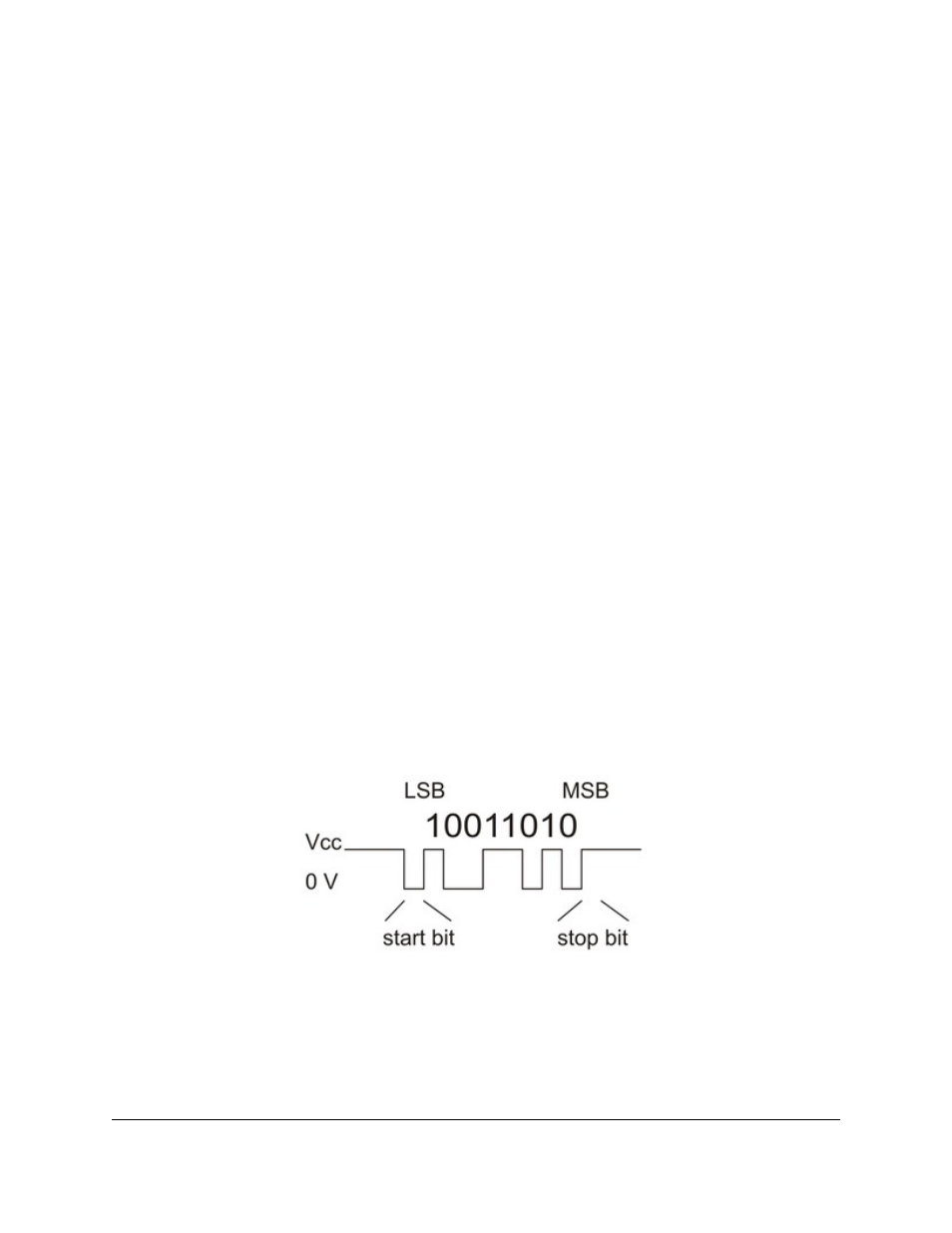
The data format is 8 data bits, one stop bit, with no parity, which is often expressed as 8-N-1. The diagram below
depicts a typical asynchronous, non-inverted TTL serial byte:
Diagram of a non-inverted TTL serial byte.
A non-inverted TTL serial line has a default (non-active) state of high. A transmitted byte begins with a single low
“start bit”, followed by the bits of the byte, least-significant bit (LSB) first. Logical ones are transmitted as high
(VCC) and logical zeros are transmitted as low (0 V), which is why this format is referred to as “non-inverted” serial.
The byte is terminated by a “stop bit”, which is the line going high for at least one bit time. Because each byte requires
a start bit, 8 data bits, and a stop bit, each byte takes 10 bit times to transmit, so the fastest possible data rate in
Pololu Maestro Servo Controller User's Guide
© 2001–2014 Pololu Corporation
5. Serial Interface
Page 37 of 73